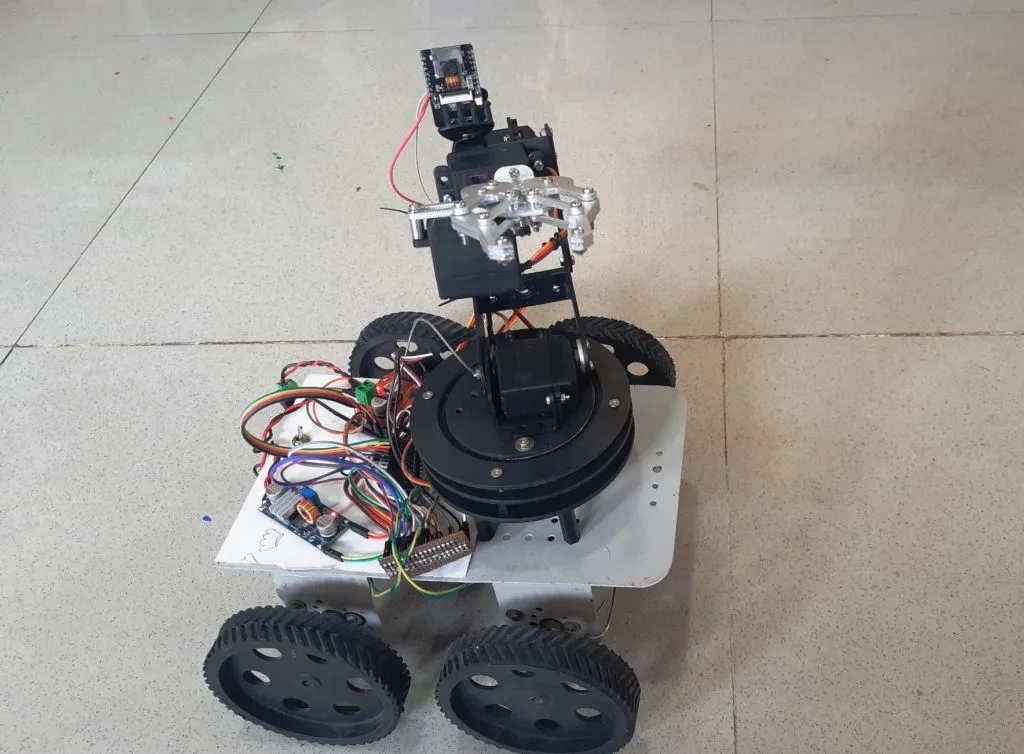
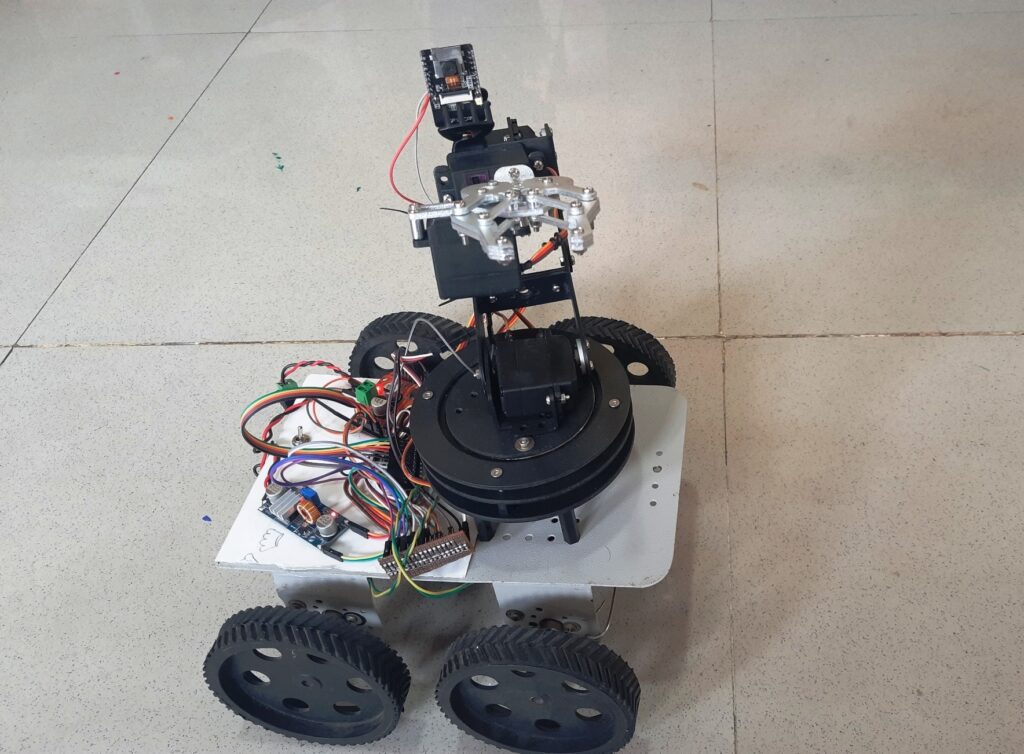
Static manipulators and mobile robot chassis each have their own advantages, and so by combining the two into a single platform, AadhunikLabs was able to realize both at the same time. The base frame is comprised of four individual wheels, each with their own high-torque geared motor and driven by a pair of VNH3ASP30 DC motor driver boards. All of the arm’s axes are moved via a single high-torque metal servo motor that not only can support its own weight, but also the weight of an object being picked up by the gripper on the end.
Beyond controlling the geared DC and servo motors, an onboard Arduino Nano RP2040 Connect receives commands over Wi-Fi® from a host PC running the control software. In here, the user can view a live camera feed coming from an ESP32 camera module as well as virtually view the robotic arm’s position in 3D space. Similar to a video game, pressing keyboard keys such as ‘WASD’ and sliding the mouse provide general movements for the chassis and arm, respectively. Meanwhile, other keys allow for manipulating the end-effector, moving the arm to default positions, and adjusting the speed.
To see this project in more detail, you can check out AadhunikLabs’ write-up on the Arduino Project Hub and watch its demo video below.
The post This remote-controlled, highly mobile robot features a 4DOF arm and an onboard camera appeared first on Arduino Blog.
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.