Schlagwort: Gyroscope
-

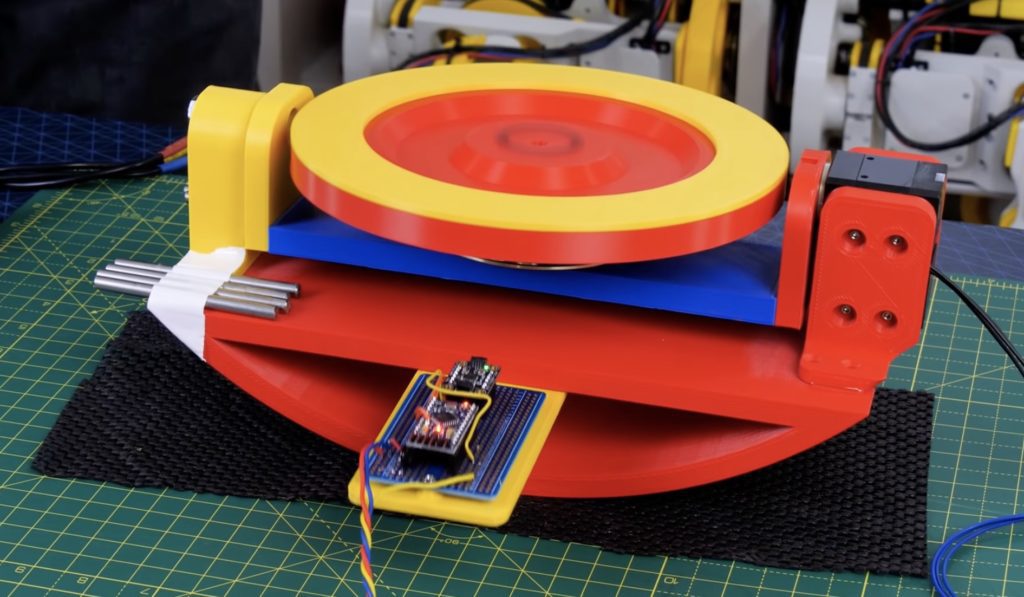
This gyroscopic stabilizer aims to reduce boat roll in waves
Reading Time: 2 minutesArduino Team — May 5th, 2022 Boats are notorious for their constant swaying back and forth when set adrift on a body of water, leading to sea sickness for those unlucky sufferers and forcing items to be securely stored to prevent them from moving around unintentionally. So, as part of their course…
-
This gyroscopic stabilizer aims to reduce boat roll in waves
Reading Time: 2 minutesArduino Team — May 5th, 2022 Boats are notorious for their constant swaying back and forth when set adrift on a body of water, leading to sea sickness for those unlucky sufferers and forcing items to be securely stored to prevent them from moving around unintentionally. So, as part of their course…
-

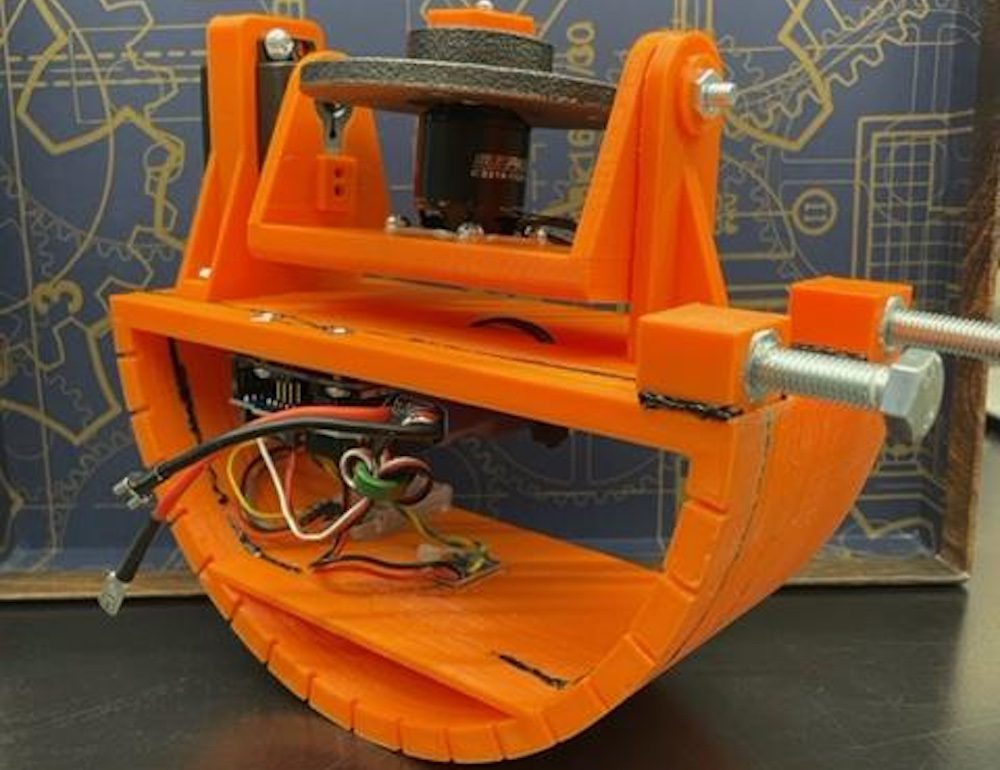
Spinning gyroscope “boat” stabilization
Reading Time: < 1 minuteSpinning gyroscope “boat” stabilization Arduino Team — May 6th, 2021 When you use a “gyroscope” in Arduino and robotics projects, generally this means a small IMU that leverages several methods of sensing to tell how a device is moving. However, physical gyroscopes are able to employ a spinning disk stay upright…