Spinning gyroscope “boat” stabilization
Spinning gyroscope “boat” stabilization
— May 6th, 2021
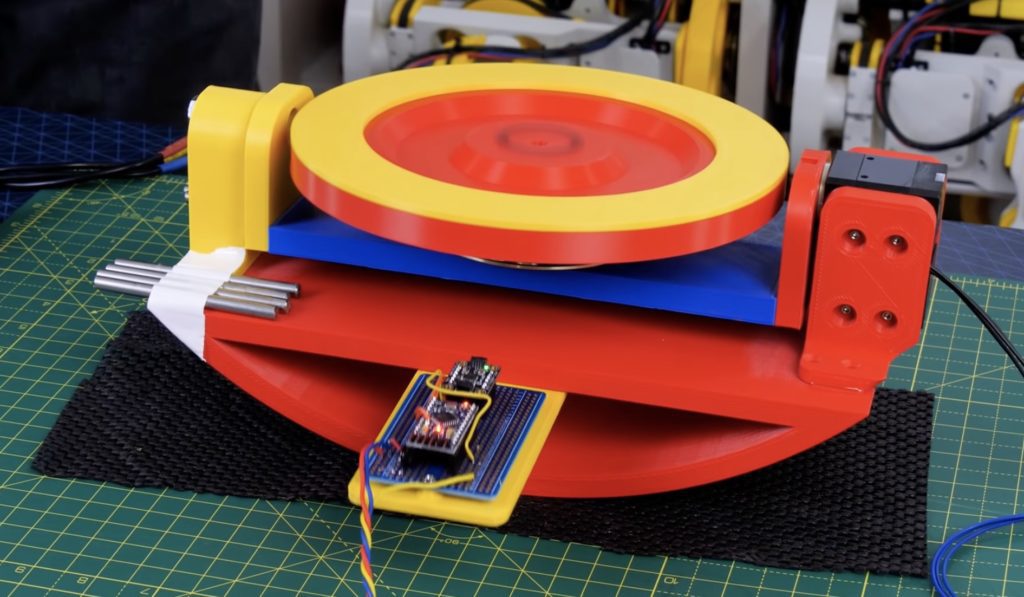
When you use a “gyroscope” in Arduino and robotics projects, generally this means a small IMU that leverages several methods of sensing to tell how a device is moving. However, physical gyroscopes are able to employ a spinning disk stay upright mechanically. Could one be combined with advanced electronics to stabilize a robot or other craft?
James Bruton answers this question in the video below, going from a “bare” gyroscope, to an unpowered gimbal, and finally to a simulated boat. This utilizes a powered gimbal for stabilization that’s tilted in one axis by a DYNAMIXEL servo. Angle is measured using an Arduino Pro Mini along with an MPU-6050 IMU, and the gyroscope is controlled by an Arduino Mega.
You can check out the progression of this fun experiment in the video below, and find code/CAD info on GitHub.
[youtube https://www.youtube.com/watch?v=UVJx8T8wTQA?feature=oembed&w=500&h=281]
Website: LINK