— May 5th, 2022
Boats are notorious for their constant swaying back and forth when set adrift on a body of water, leading to sea sickness for those unlucky sufferers and forcing items to be securely stored to prevent them from moving around unintentionally. So, as part of their course in electrical engineering, Kaden Werner and Alex Morin partnered together to create a control system that could effectively eliminate watercraft roll through the use of angular momentum.
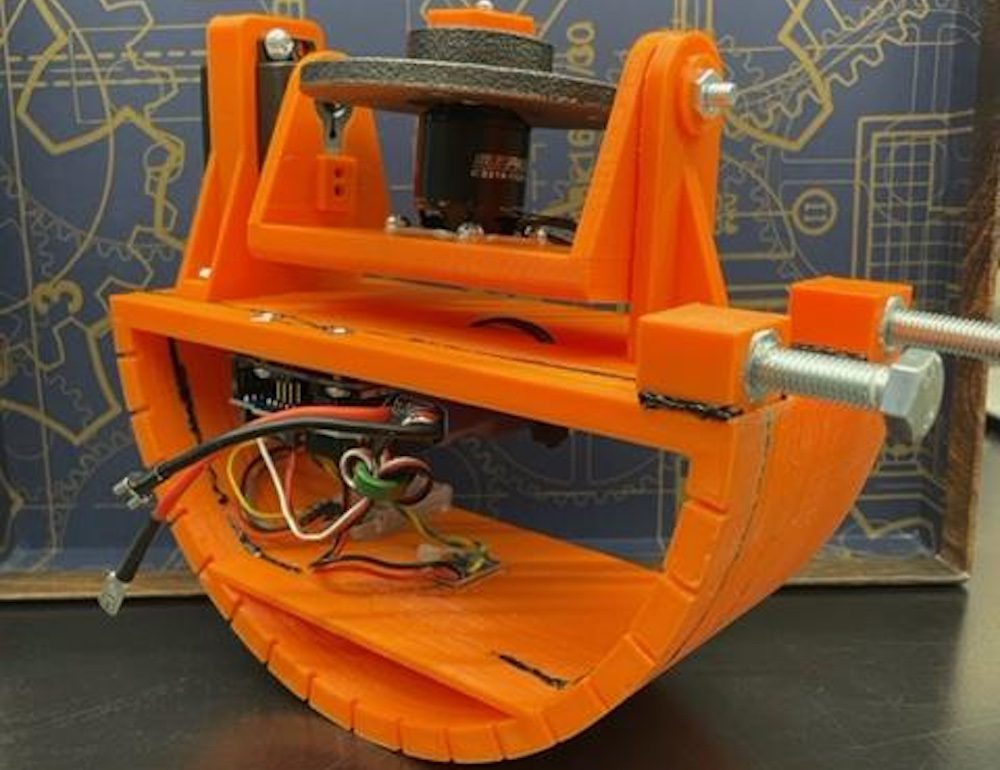
Similar to how the International Space Station maintains its orientation, the team’s scaled prototype system relies on a rotating flywheel that generates large amounts of angular momentum in a certain axis. A brushless DC motor and driver are responsible for spinning up the circular mass, while a servo motor on one side rotates the cradle to the desired angle. All of this is done with an Arduino Uno that monitors the boat’s current orientation by taking measurements from an IMU.
If the angle is more than two degrees off-center, the PID loop is updated, which in turn causes the servo to move to a position that can counteract the tilt, as well as spin up the flywheel by outputting a PWM signal to driver.
For more details about how the pair of students came up with their design and built the device, you can view their project here on Instructables.
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.