OmBURo is an Arduino-controlled unicycle robot with an active omnidirectional wheel
— February 4th, 2020
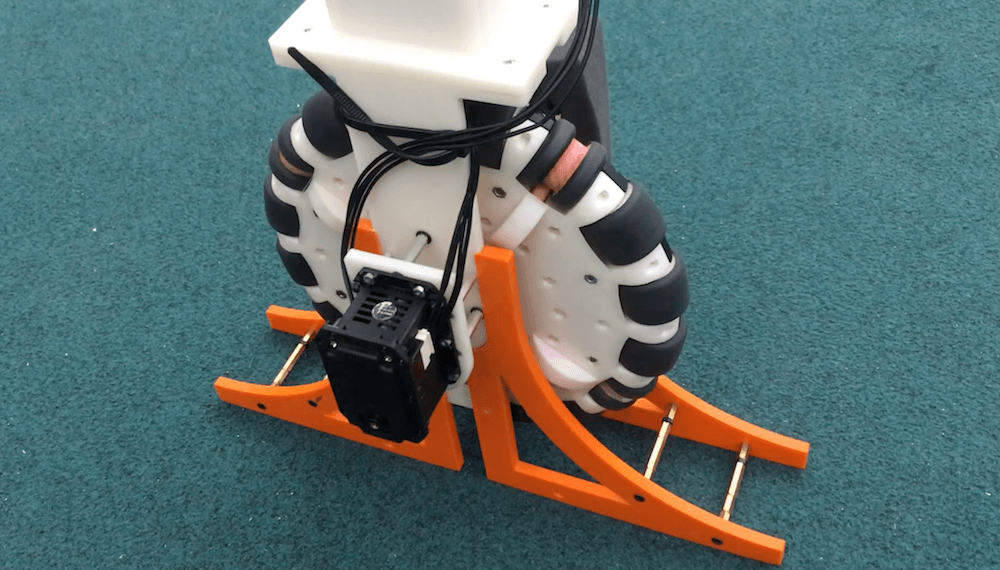
Omni wheels normally contain a number of rollers arranged on their circumference, allowing them to slide left and right and perform various tricks when combined with others. The rollers on UCLA researchers Junjie Shen and Dennis Hong’s OmBURo, however, are quite different in that they are actually powered, enabling a single wheel to accomplish some impressive feats on its own.
These powered rollers give OmBURo the ability to move in both longitudinal and lateral directions simultaneously, balancing as a dual-axis wheeled inverted pendulum.
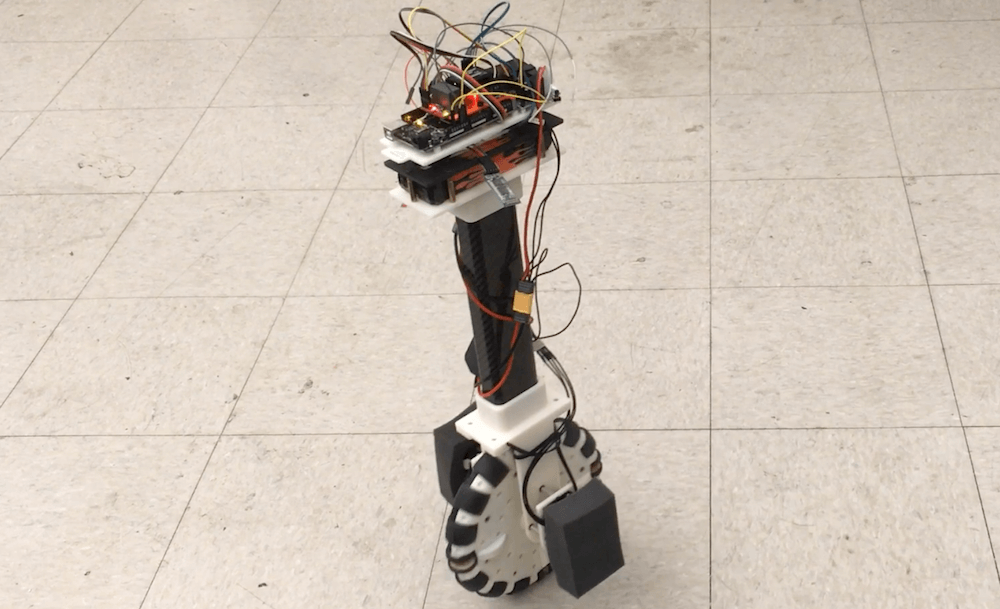
Control is accomplished via an Arduino Mega along with an IMU and encoders for its two servo motors —one tasked with driving the wheel backwards and forwards, the second for actuating the rollers laterally via helical gears and a flexible shaft.
As seen in the video below, the robot can follow different paths via remote control, and even balance on an inclined plane. More informaton on the impressive build is available in the Shen and Hong’s research paper here.
[youtube https://www.youtube.com/watch?v=avtlx1-X3lo?feature=oembed&w=500&h=281]
A mobility mechanism for robots to be used in tight spaces shared with people requires it to have a small footprint, to move omnidirectionally, as well as to be highly maneuverable. However, currently there exist few such mobility mechanisms that satisfy all these conditions well. Here we introduce Omnidirectional Balancing Unicycle Robot (OmBURo), a novel unicycle robot with active omnidirectional wheel. The effect is that the unicycle robot can drive in both longitudinal and lateral directions simultaneously. Thus, it can dynamically balance itself based on the principle of dual-axis wheeled inverted pendulum. This letter discloses the early development of this novel unicycle robot involving the overall design, modeling, and control, as well as presents some preliminary results including station keeping and path following. With its very compact structure and agile mobility, it might be the ideal locomotion mechanism for robots to be used in human environments in the future.
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.