Schlagwort: Omni Wheel Robot
-

This walking machine can mosey in any direction
Reading Time: 2 minutesArduino Team — July 27th, 2022 Wheeled vehicles are so common because they’re efficient. If a vehicle will drive on a relatively smooth and flat surface, wheels are the most efficient option. But on rough terrain, wheels don’t always cut it. For such terrain, tank tracks and more exotic options often perform…
-

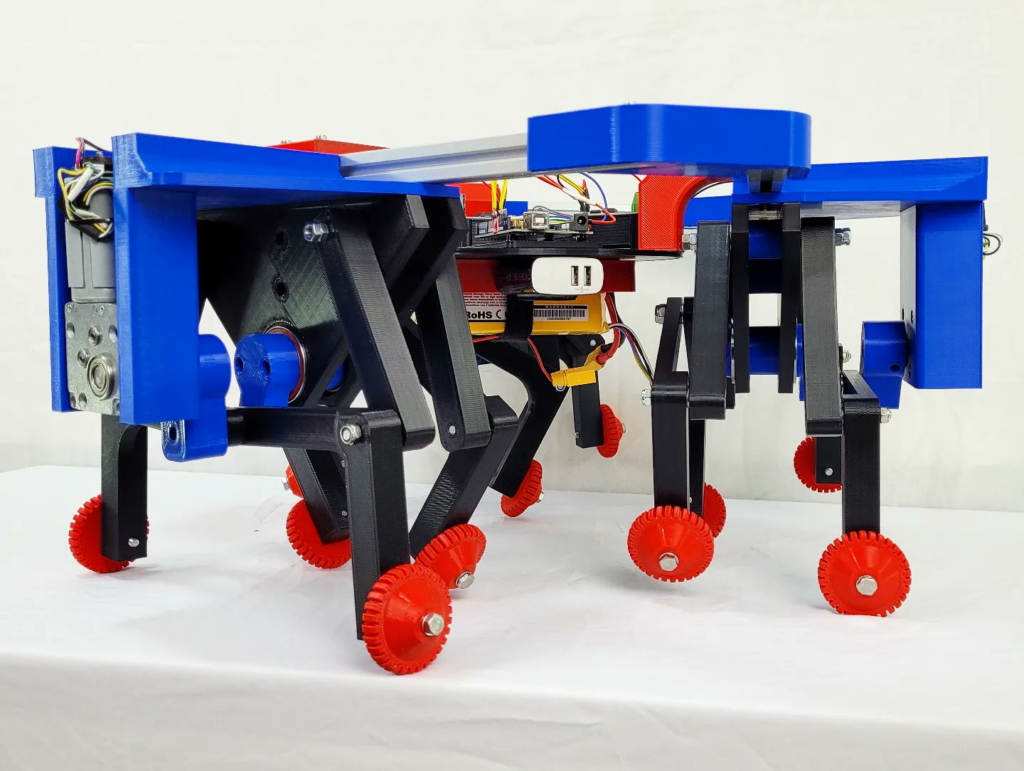
Can a triangle of tank tracks outperform omni wheels?
Reading Time: 2 minutesArduino Team — March 16th, 2022 Omni wheels are fantastic because they let a vehicle drive forward, backward, left, right, and rotate — all without a steering mechanism. There are only two catches: all four omni wheels must be driven and omni wheels don’t handle rough terrain or obstacles well. Tank tracks…
-

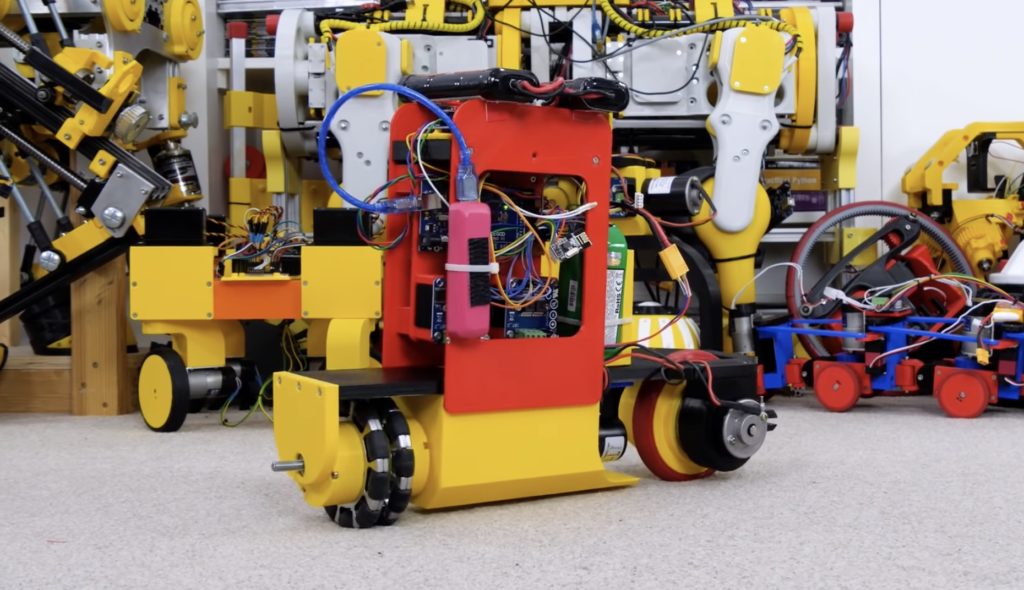
James Bruton’s strange bicycle robot self-balances with an omni wheel
Reading Time: 2 minutesJames Bruton’s strange bicycle robot self-balances with an omni wheel Arduino Team — February 26th, 2022 Omni wheels, sometimes referred to by the trademarked Mecanum name, are special wheels lined with rollers. Thanks to the orientation of the rollers, a vehicle equipped with four omni wheels (each driven independently) can move in…
-

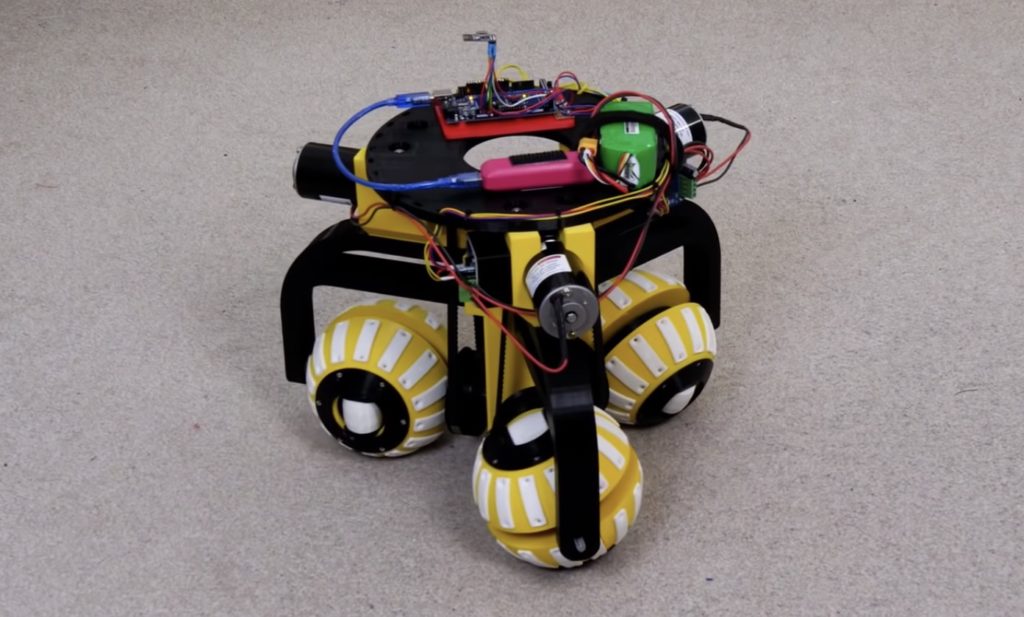
James Bruton’s robot uses three ball-shaped wheels to move in any direction
Reading Time: 2 minutesJames Bruton’s robot uses three ball-shaped wheels to move in any direction Arduino Team — June 5th, 2021 Wheeled robots normally have wheels that move in a single axis and steer by using either differential speeds or by pivoting some kind of guide wheel. However, this leads to some drawbacks, the most…
-

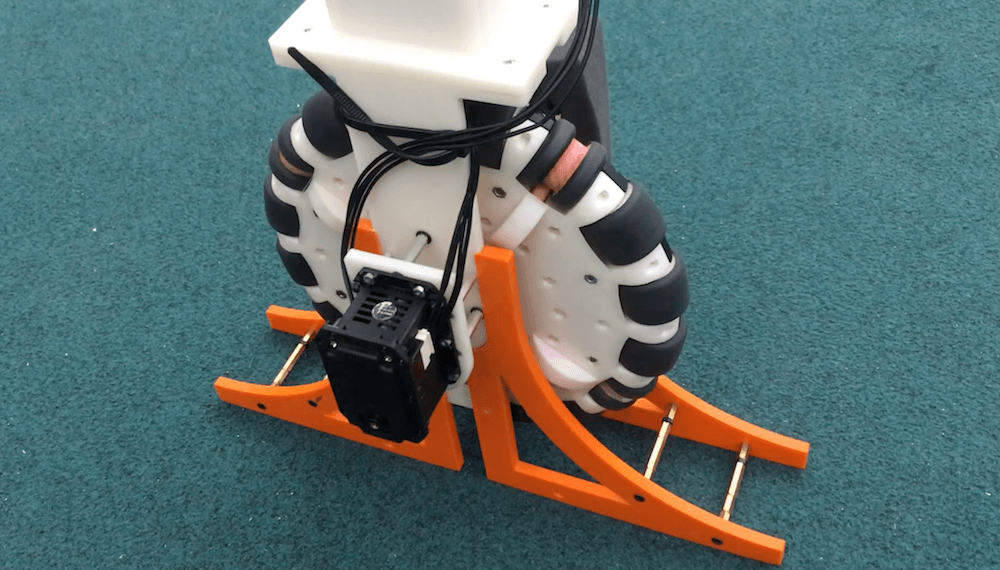
OmBURo is an Arduino-controlled unicycle robot with an active omnidirectional wheel
Reading Time: 2 minutesOmBURo is an Arduino-controlled unicycle robot with an active omnidirectional wheel Arduino Team — February 4th, 2020 Omni wheels normally contain a number of rollers arranged on their circumference, allowing them to slide left and right and perform various tricks when combined with others. The rollers on UCLA researchers Junjie Shen and Dennis…
-

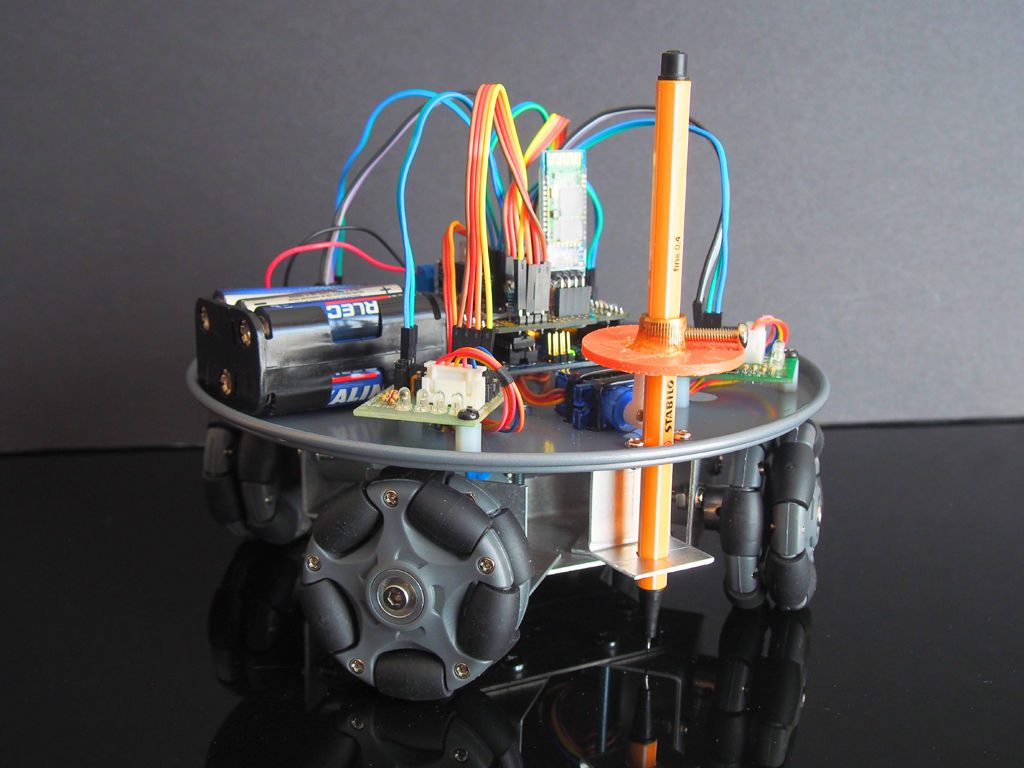
Omni-wheel robot slides across the paper as a mobile plotter
Reading Time: < 1 minuteOmni-wheel robot slides across the paper as a mobile plotter Arduino Team — March 8th, 2019 Retired maker “lingb” created an omni-bot, with four wheels that allow sliding motion in the X/Y plane courtesy of their perpendicular rollers. While that alone would have been a fun build, he also attached a…
-

Designing an omni wheel robot platform with Arduino
Reading Time: < 1 minuteDesigning an omni wheel robot platform with Arduino Arduino Team — November 27th, 2018 Omni wheels are devices that look like wheels with extra rollers positioned along their circumference. This allows robots to move forwards and backwards, as well as slide and spin depending on how the wheels are powered. Maker…