This is a ‘Spot Micro’ walking quadruped robot running on Raspberry Pi 3B. By building this project, redditor /thetrueonion (aka Mike) wanted to teach themself robotic software development in C++ and Python, get the robot walking, and master velocity and directional control.
[youtube https://www.youtube.com/watch?v=S-uzWG9Z-5E?feature=oembed&w=500&h=281]
Mike was inspired by Spot, one of Boston Dynamics’ robots developed for industry to perform remote operation and autonomous sensing.
What’s it made of?
- Raspberry Pi 3B
- Servo control board: PCA9685, controlled via I2C
- Servos: 12 × PDI-HV5523MG
- LCD Panel: 16×2 I2C LCD panel
- Battery: 2s 4000 mAh LiPo, direct connection to power servos
- UBEC: HKU5 5V/5A ubec, used as 5V voltage regulator to power Raspberry Pi, LCD panel, PCA9685 control board
- Thingiverse 3D-printed Spot Micro frame
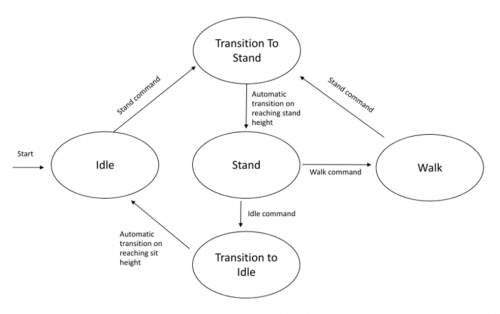
How does it walk?
The mini ‘Spot Micro’ bot rocks a three-axis angle command/body pose control mode via keyboard and can achieve ‘trot gait’ or ‘walk gait’. The former is a four-phase gait with symmetric motion of two legs at a time (like a horse trotting). The latter is an eight-phase gait with one leg swinging at a time and a body shift in between for balance (like humans walking).
Mike breaks down how they got the robot walking, right down to the order the servos need to be connected to the PCA9685 control board, in this extensive walkthrough.
Here’s the code
And yes, this is one of those magical projects with all the code you need stored on GitHub. The software is implemented on a Raspberry Pi 3B running Ubuntu 16.04. It’s composed on C++ and Python nodes in a ROS framework.
-

Pose -
Strut


What’s next?
Mike isn’t finished yet: they are looking to improve their yellow beast by incorporating a lidar to achieve simple 2D mapping of a room. Also on the list is developing an autonomous motion-planning module to guide the robot to execute a simple task around a sensed 2D environment. And finally, adding a camera or webcam to conduct basic image classification would finesse their creation.
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.