

Experienced servers are masters of balance and coordination, being able to carry several full glasses on a tray without spilling a drop. But many of us lack that skill and can’t carry even a single glass across a room without splashing half of it on our feet. To help the clumsy among us, YouTuber The Fedmog Challenge created this robotic beer tray that automatically balances glasses to avoid spills.
This robotic beer tray relies on the same kind of control algorithm used by self-balancing robots and drones: PID (proportional-integral-derivative). That acronym isn’t very informative unless you were a math major, but it means that the robot uses fancy calculations to compensate for movement in real time through a closed-feedback loop. In this case, the beer tray is constantly checking to see if it is level. If it isn’t, then it uses motors to bring itself back to level as fast as it can without overcompensating.
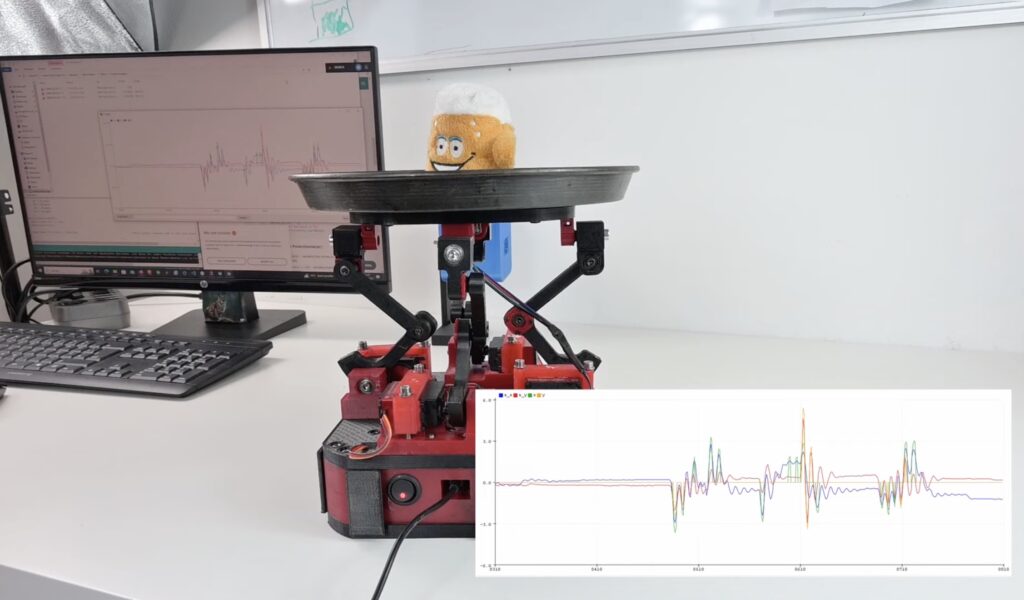
The Fedmog Challenge made this machine using 3D-printed parts. The user holds the base and that connects to the tray on top via four servo-actuated linkages. An MPU6050 gyro/accelerometer module mounts to the tray and to detect its position. An Arduino Nano board monitors the MPU6050 and adjusts the servo motor angles as necessary to keep the tray level.
There are a couple of problems with this design that keep it from being practical, though. First, the servos aren’t strong enough to handle much weight. Second, keeping the tray level isn’t enough to avoid spills. To do that, it would need to tilt to compensate for horizontal inertia. But we still like the idea and the build is fun to watch.
The post This robotic beer tray keeps servers from spilling suds appeared first on Arduino Blog.
Website: LINK