A designer has developed a 3D printed robot that can auto-adjust its height to maneuver a wide range of spaces.
A Reddit member called potentprintables has just presented a 3D printed robot that adjusts its size in order to fit into tight spaces. That means the robot can also squeeze underneath doors.
It’s really rather remarkable to watch the Minority Report inspired creation crawl across the floor and adjust its size as it hits an obstacle.
The user says that the robot is actually based on the design by David Zarrouk, Andrew Pullin, Nick Kohut and Ronald Fearing at the Biomimetic Millisystems Lab, UC Berkeley.
Inspired by Nature
The original six-legged, sprawl-tuned autonomous robot (STAR) is able to adapt its leg-to-surface contact angles. According to the accompanying research paper, the Zarrouk team drew their inspiration from insects. Specifically, they focused on the crawling motion of the robot.
Furthermore, the STAR device was developed with easy recreation in mind. It has been 3D printed using a Project 3000 machine.
Potentprintables’ version of the device expands on the original concept.
The user also shared full instructions and a bill of materials needed to allow other experienced 3D creators to have a go. Although easy to print, he warns that the mechanics necessary to finish the project aren’t for beginners.
Take a look here.
Source: Reddit.com
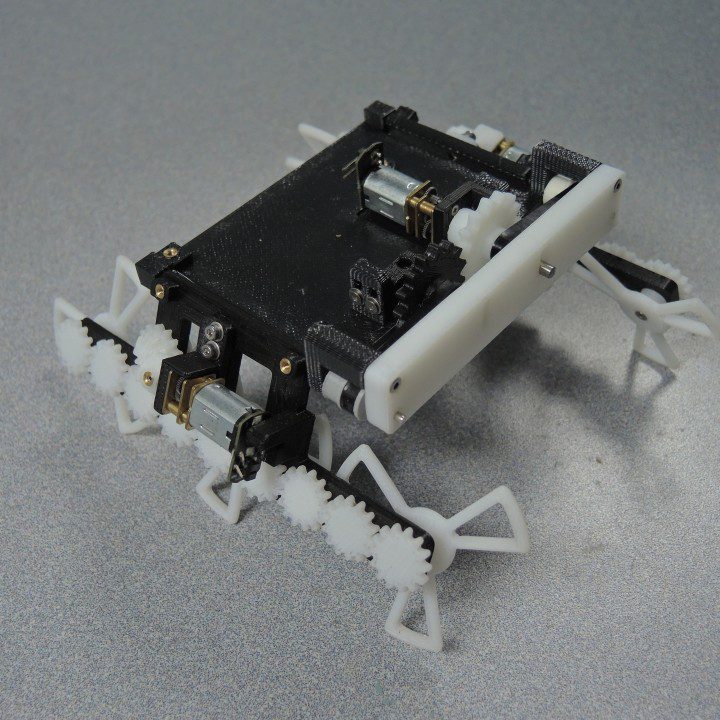
The finished 3D printed crawler robot. (Image: PotentPrintables)
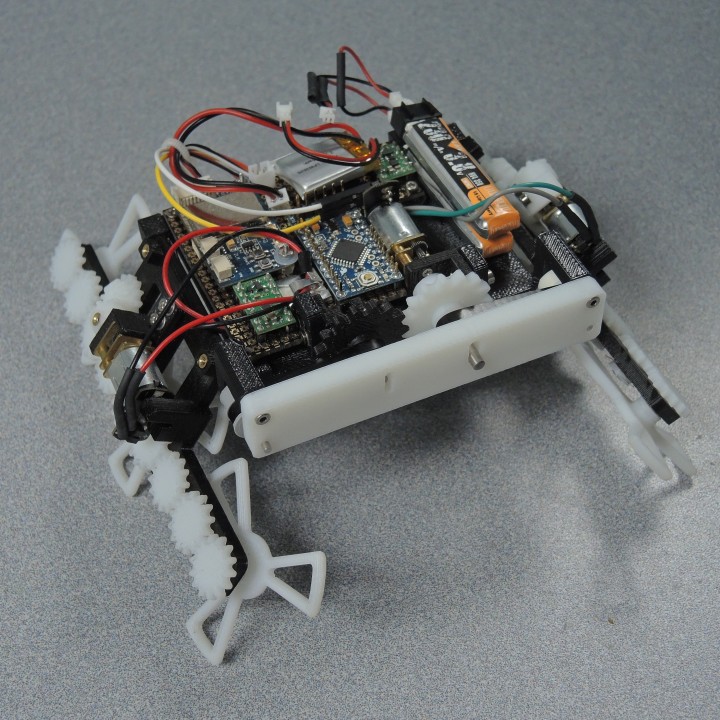
The electronics needed to finish the STAR recreation. (Image: PotentPrintables)
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.