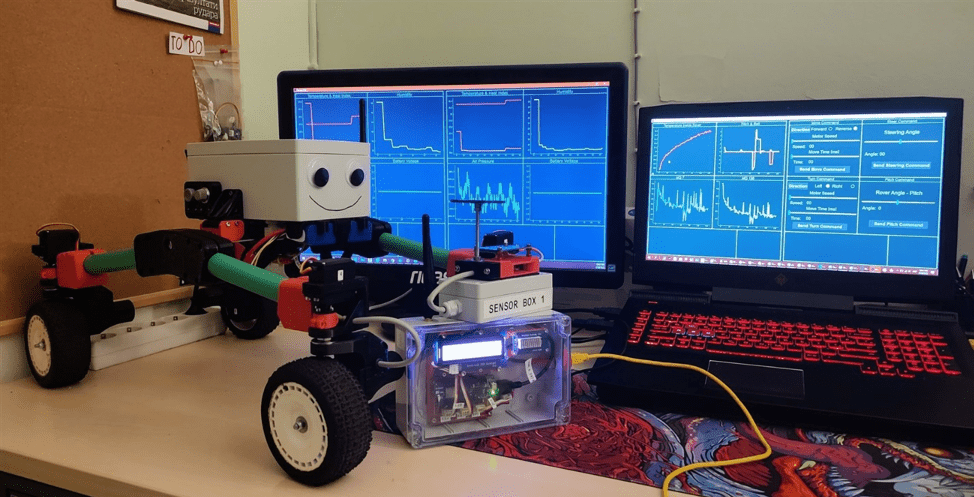
This MKR WAN 1300-powered rover was inspired by the orb-weaver spider
Reading Time: 2 minutesArduino Team — April 11th, 2022 Orb-weaver spiders are often found in gardens and are famous for the intricate webs they spin to catch pre, and as the name implies, this web is in the shape of a circle. In keeping with the theme, element14 user Miloš Rašic had the idea to build a small rover taking inspiration […]


