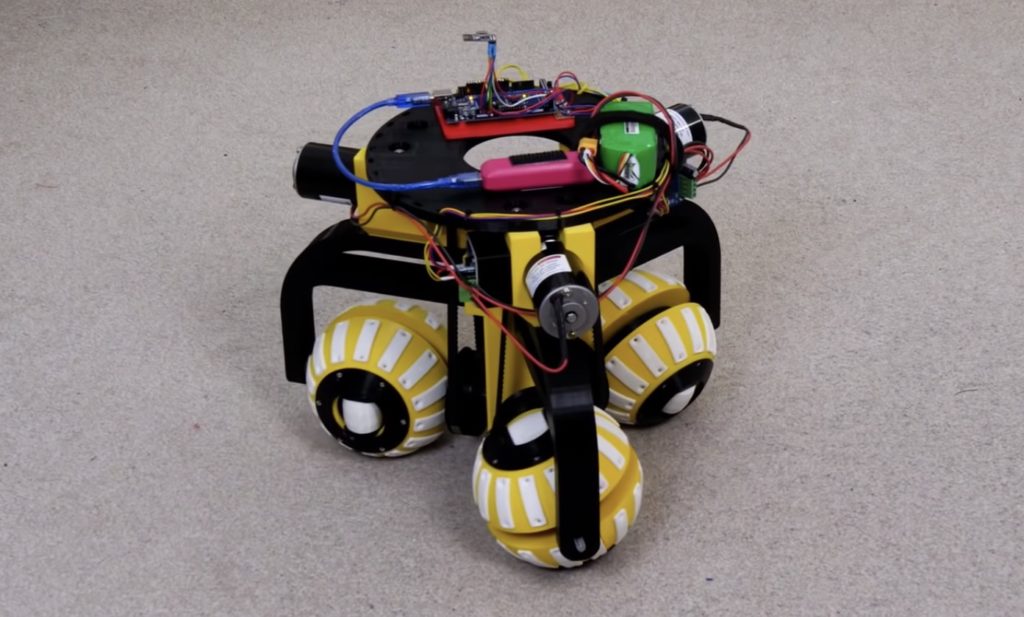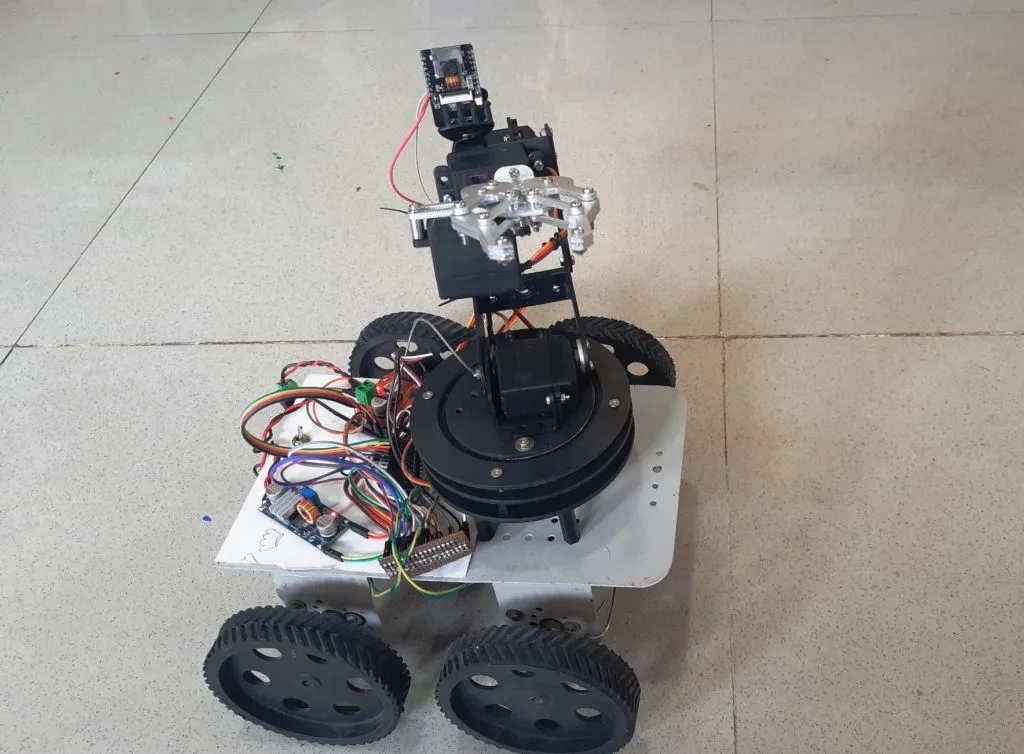
This remote-controlled, highly mobile robot features a 4DOF arm and an onboard camera
Reading Time: 2 minutesStatic manipulators and mobile robot chassis each have their own advantages, and so by combining the two into a single platform, AadhunikLabs was able to realize both at the same time. The base frame is comprised of four individual wheels, each with their own high-torque geared motor and driven by a pair of VNH3ASP30 DC motor driver boards. […]