M.A.R.S. Rover review
Start building
Packed in a cardboard box, the kit features a large array of components, including six motors, five servos, and no fewer than 30 PCB shapes to create the structure. In large kits like these, finding the right components and tiny screws can be a pain, so it’s a great help that they’re sorted into ten plastic bags relating to each step of the assembly process.
The latter is detailed in an online guide featuring plenty of photos, making it easy to follow. Even so, you’ll need plenty of time to build such a serious kit. 4tronix reckons it will take even an experienced kit builder around two hours; for others, you can at least double that time.
In the event, it took us several hours to assemble, partly due to an issue with screwing the bogies onto the rocker arms on either side using a small screw and nyloc nut. We found it impossible to screw it on tightly enough using the supplied mini screwdriver and spanner, so had to resort to using a larger, sturdier screwdriver.
Other than that hiccup, it was a fairly straightforward if lengthy process. Some of the PCB pieces have nuts pre-installed, which does make things a lot easier.
Steering servos
Four servos are used to steer the front and rear wheels. A handy little ServoZero board is included to connect to the servos during assembly and set them to zero before attaching the horn and motor mount at approximately 90 degrees to the Rover’s body. Fine adjustments may be made to the wheel alignment later in the software.
A differential system, connecting the rocker arms, keeps the rover body level as the wheels on one side or the other traverse uneven terrain.
Fitting the motors is easy enough, as each is pre-wired with a JST connector that fits into one of the ports on the main board.
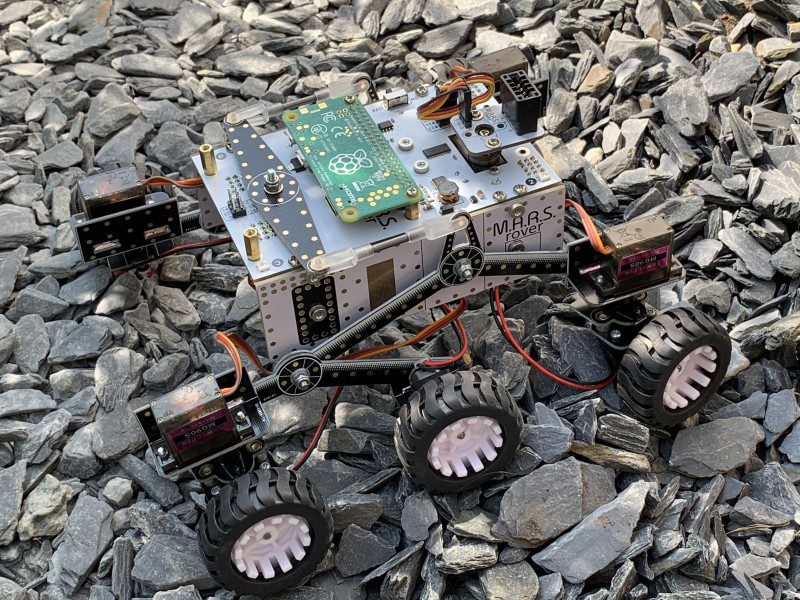
With the main body and suspension system assembled, and chunky wheels attached, the final touch is to add a mast with an ultrasonic distance sensor to the top. This even has a servo so you can rotate it with code.
Rolling Rover
Insert four AA batteries (not supplied) in the holder at the bottom the main board and mount a Raspberry Pi Zero on top and you’re ready to install the software. A Python library is accompanied by several code examples, including one that enables you to control the Rover remotely (via SSH) with your keyboard. There’s also an example to test an optional keypad (£9/$12) that fits onto the rear.
While the Rover moves at fairly sedate pace, the steering servos allow it to turn quickly and more smoothly than with the typical tank steering on other wheeled robots. Best of all, that rocker-bogie suspension system enables it to roll over an obstacle, even when only one set of wheels is traversing it, with all six wheels magically maintaining contact with the ground – it’s fascinating to watch in action and far superior to fixed-wheel buggies at handling difficult terrain.
Verdict
9/10
A little pricey, but this is a high-quality kit. The Rover looks cool and can traverse the toughest terrain with its six driven wheels, servo steering, and clever suspension system.