A group of us NASA engineers work on the International Space Station (ISS) for our day-jobs but craved something more tangible than computer models and data curves to share with the world. So, in our free time, we built ISS Mimic. It’s still in the works, but we are publishing now to celebrate 20 years of continuous human presence in space on the ISS.
[youtube https://www.youtube.com/watch?v=W9iZBjzOEEQ?feature=oembed&w=500&h=281]
This video was filmed and produced by our friend, new teammate, and Raspberry Pi regular Estefannie of Estefannie Explains it All. Most of the images in this blog are screen grabbed from her wonderful video too.
What does Mimic do?
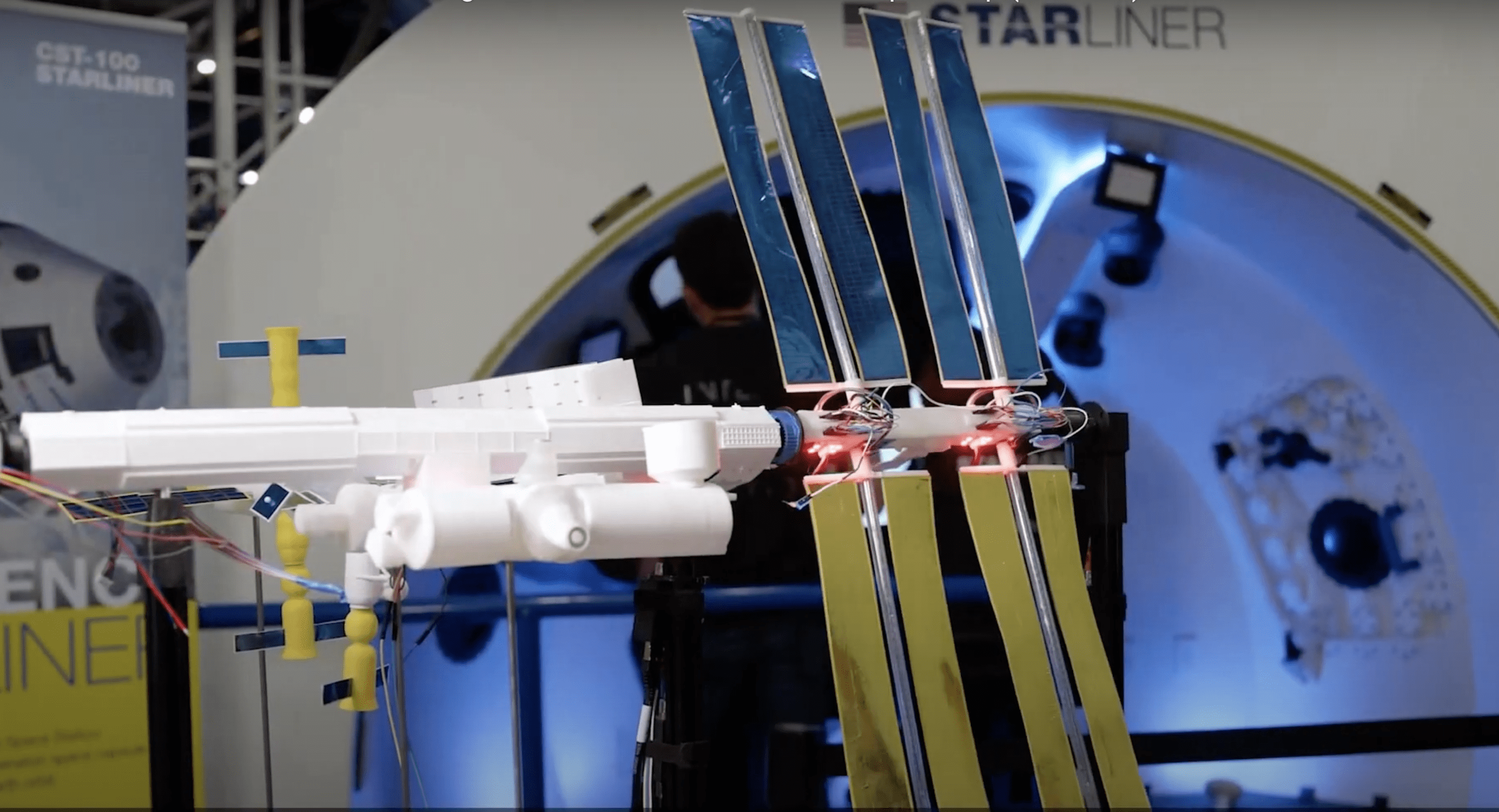
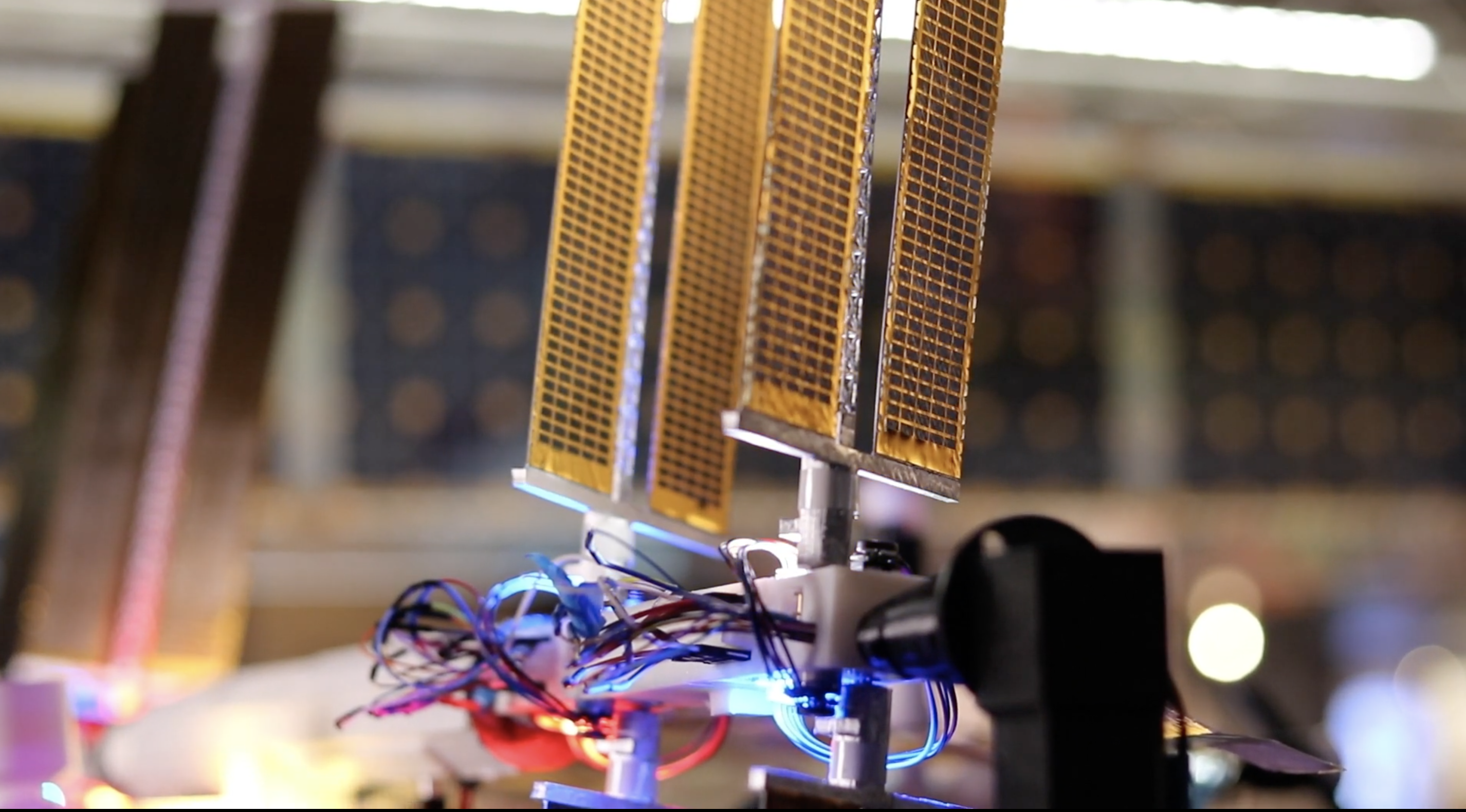
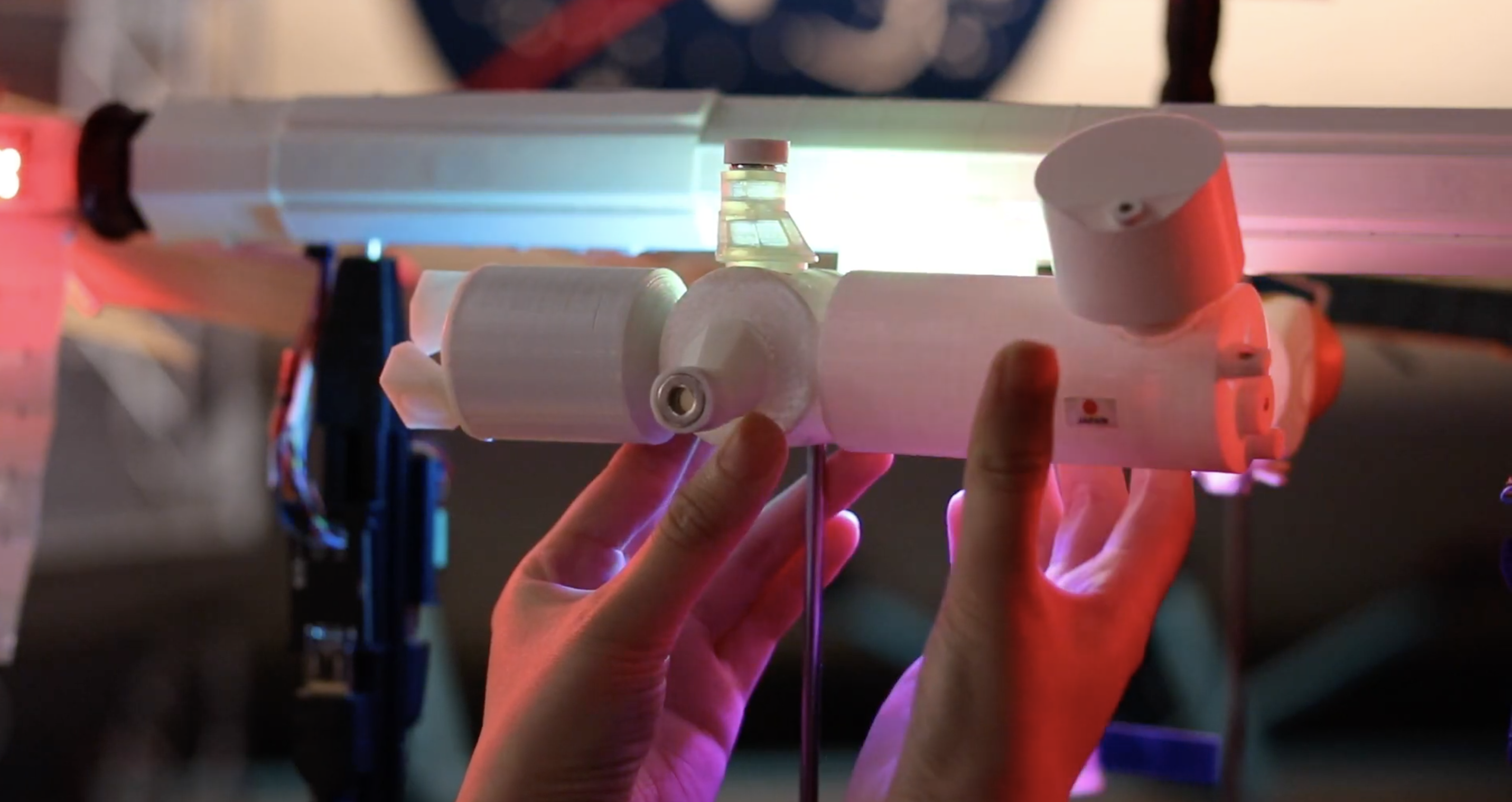
ISS Mimic is a 1% scale model of the International Space Station, bringing the American football field-sized beauty down to a tabletop-sized build. Most elements are 3D printed — even the solar arrays. It has 12 motors: 10 to control the solar panels and two to turn the thermal radiators. All of these are fed by live data streaming from the ISS, so what you see on ISS Mimic is what’s happening that very moment on the real deal up in space.
Physical connection

Despite the global ISS effort, most people seem to feel disconnected from space exploration and all the STEAM goodness within. Beyond headlines and rocket launches, even space enthusiasts may feel out of touch. Most of what is available is via apps and videos, which are great, but miss the physical aspect.

ISS Mimic is intended to provide an earthbound, tangible connection to that so-close-but-so-far-away orbiting science platform. We want space excitement to fuel STEAM interest.
Raspberry Pi brains and Braun
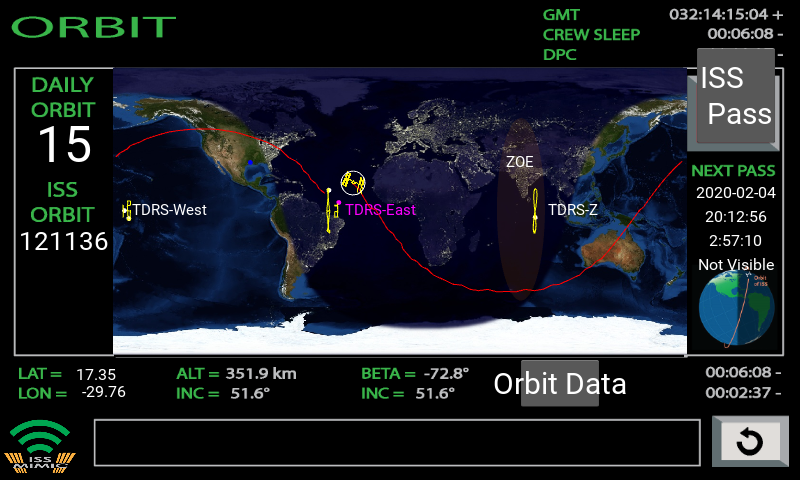
As you may have guessed, a Raspberry Pi is the brain of the business. Raspberry Pi taps into NASA’s public ISS live data stream to parse the telemetry into the bits we want. There’s JavaScript and tons of Python, including Kivy for the graphics.
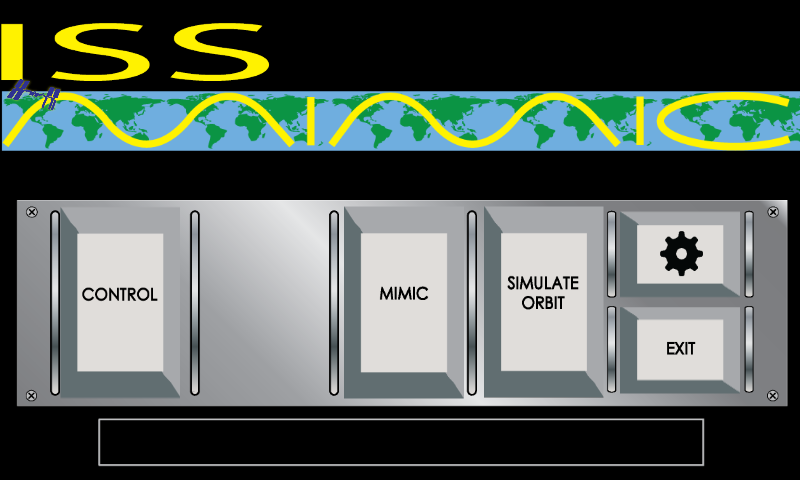
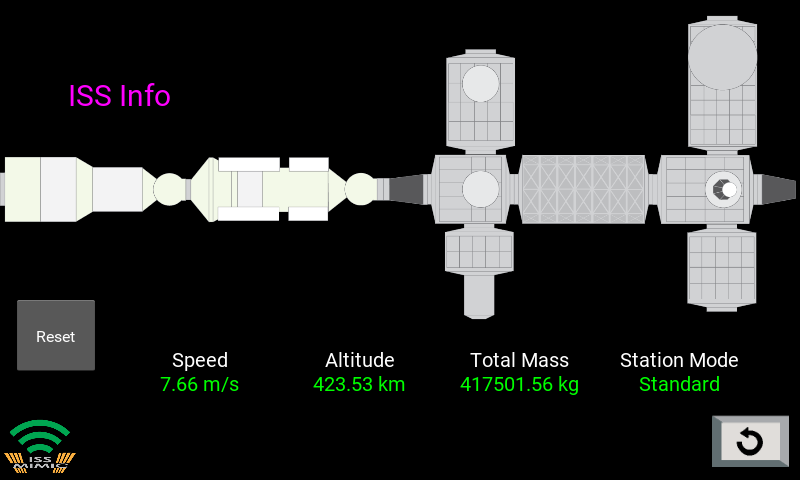
Users toggle through various touchscreen data displays of things like battery charge states, electrical power generated, joint angles, communication dish status, gyroscope torques, and even airlock air pressure — fun to watch prior to a spacewalk!
The user can also touchscreen-activate the physical model, in which case Raspberry Pi sends the telemetry along to Arduinos, which in turn command motors in the model to do their thing, rotating the solar panels and thermal radiators to the proper angle. The solar panel joints use compact geared DC motors with Hall-effect sensors for feedback. The sensor signals are sent back down to the Arduino, which keeps track of the position of each joint compared to ISS telemetry, and updates motor command accordingly to stay in sync.
The thermal radiator motors are simpler. Since they only rotate about 180° total, a simple RC micro servo is utilised with the desired position sent from an Arduino directly from the Raspberry Pi data stream.
When MIMIC is in ‘live mode’, the motor commands are the exact data stream coming from ISS. This is a fun mode to leave it in for long durations when it’s in the corner of the room. But it changes slowly, so we also include advanced playback, where prior orbit data stored on Raspberry Pi is played back at 60× speed. A regular 90-minute orbit profile can be played back in 90 seconds.
We also have ‘disco mode’, which may have been birthed during lack of sleep, but now we plan to utilise it whenever we want to grab attention — such as to alert users that the ISS is flying overhead.
LED addiction
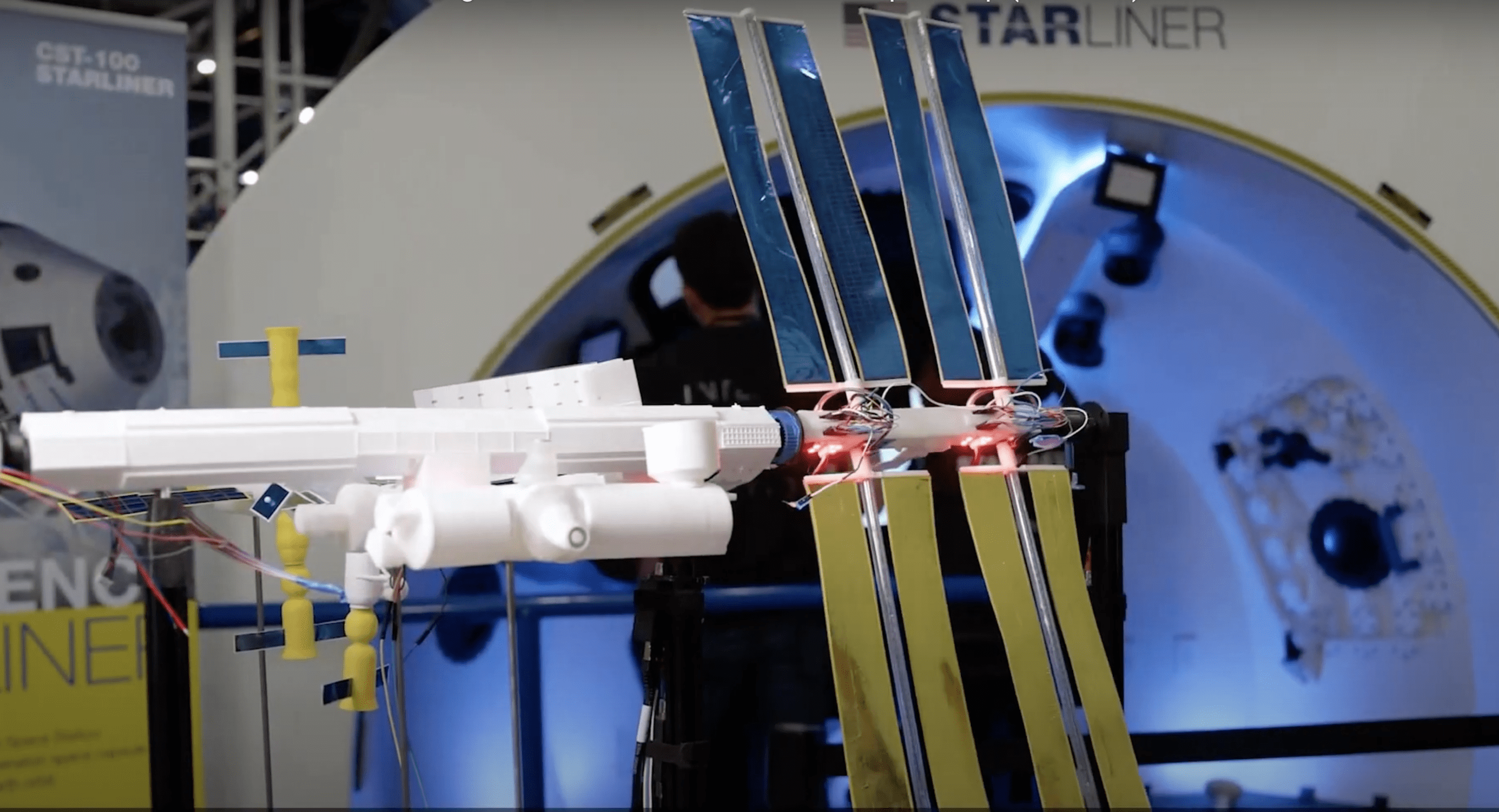
We may have a mild LED addiction, and we have LEDs embedded where the ISS batteries would live at the base of the solar arrays. They change colour with the charge voltage, so we can tell by watching them when the ISS is going into Earth’s shadow, or when the batteries are fully charged, etc.
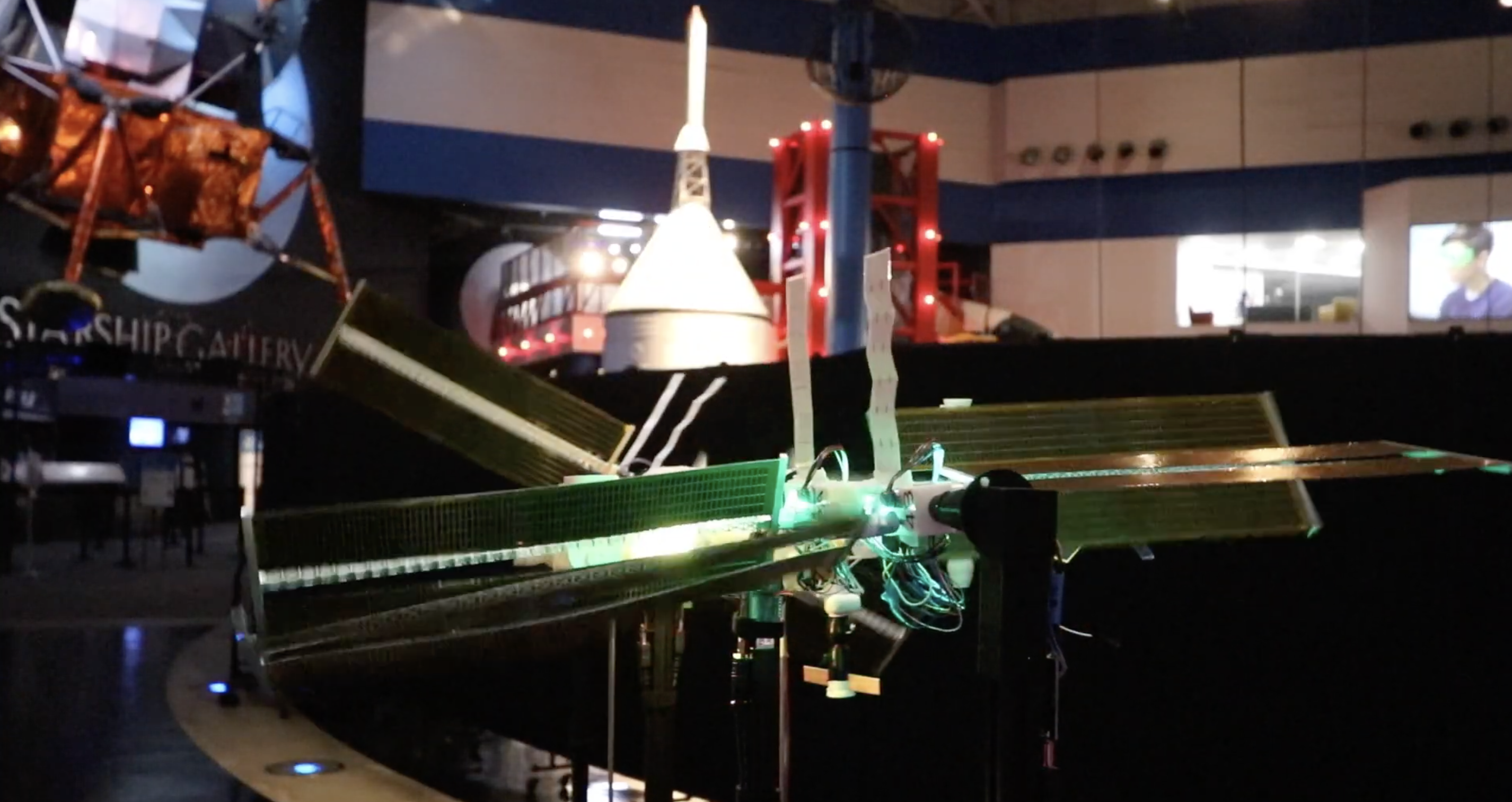
A few times when we were working on the model and the LEDs suddenly changed, we thought we had bumped something. But it turned out the first array was edging behind Earth. These are fun to watch during spacewalks, and the model gives us advanced notice that the crew is about to be in darkness.
We plan to cram more LEDs in to react to other data. The project is open source, so anyone can build one and improve the design — help wanted! After all, the ISS itself is a worldwide collaboration with 19 countries participating by providing components and crew.
Chaotic wire management
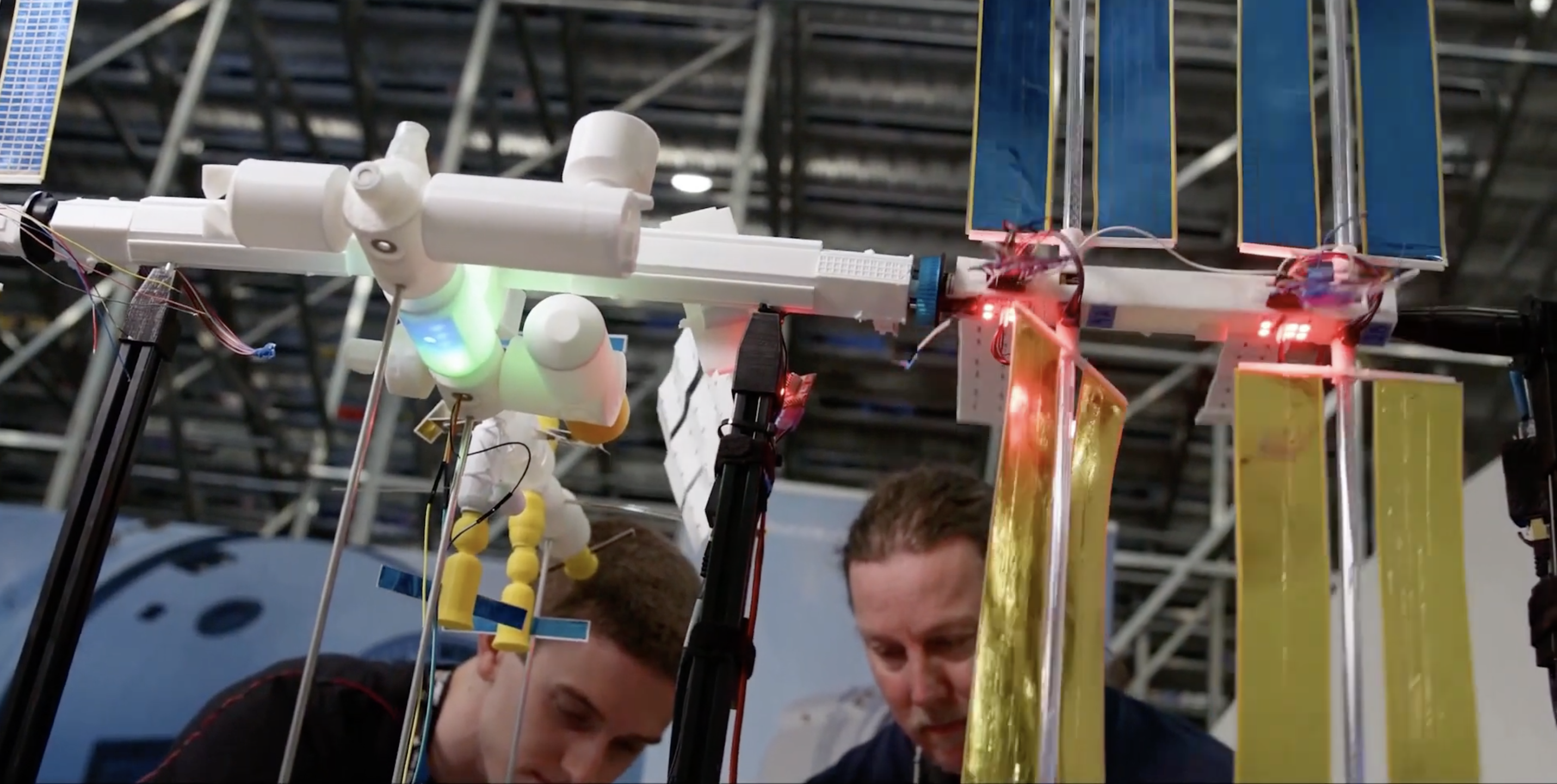
The solar panels on the ISS are mounted on what’s known as the ‘outboard truss’ — one each on the Port and Starboard ends of ISS. Everything on the outboard truss rotates together as part of the sun-tracking (in addition to each solar array rotating individually). So, you can’t just run the power/signal wires through the interface or they would twist and break. ISS Mimic has the same issue.
Even though our solar panels don’t generate power, their motors still require power and signals. The ISS has a specialised, unique build; but fortunately we were able to solve our problem with a simple slip ring design sourced from Amazon.
Wire management turned out to be a big issue for us. We had bird nests in several places early on (still present on the Port side solar), so we created some custom PCBs just for wire management, to keep the chaos down. We incorporated HDMI connectors and cables in some places to provide nice shielding and convenient sized coupling — actually a bit more compact than the Ethernet we’d used before.
Also, those solar panels are huge, and the mechanism that supports the outboard truss (everything on the sides that rotate together) on the ISS includes a massive 10 foot diameter bull gear called the Solar Alpha Rotary Joint. A pinion gear from a motor interfaces with this gear to turn it as needed.
We were pleasantly surprised that our 3D-printed bull gear held up quite well with a similar pinion-driven design. Overall, our 3D prints have survived better than expected. We are revamping most models to include more detail, and we could certainly use help here.
Education focus
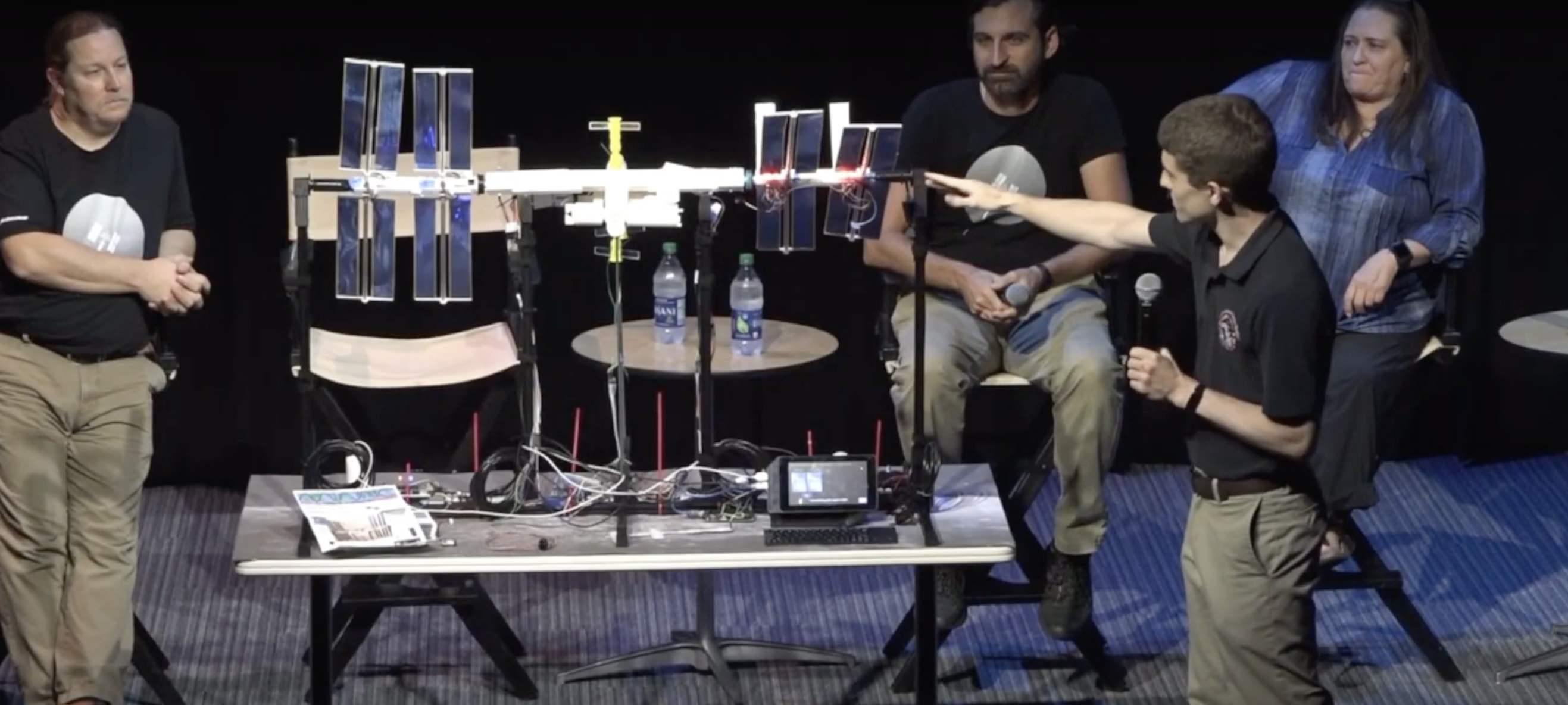
Our sights are set firmly on educators as our primary area of focus, and we’ve been excited to partner with Space Center Houston to speak at public events and a space exploration educator conference with international attendance earlier this year.
[youtube https://www.youtube.com/watch?v=sbdHXjDQ-U8?feature=oembed&w=500&h=281]
The feedback has been encouraging and enlightening. We want to keep getting feedback from educators, so please provide more insights via the contact info listed at the bottom.
NASA Mission Control — failure is actually an option… sometimes
A highlight for the team was when the ISS Mimic prototype was requested to live for a month in NASA’s Mission Control Center and was synced to live data during an historic spacewalk. Mimic experienced an ‘anomaly’ when a loose wire caused one of the solar panel motors to spin at 100× the normal rate.

You’ll be happy to know that none of the engineering professionals were fooled into thinking the real ISS was doing time-trials. Did I mention it’s still a work in progress? You can’t be scared of failure (for non-critical applications!), particularly when developing something brand-new. It’s part of shaking out problems and learning.
Space exploration has an exciting Future
It’s an exciting time in human and robotic spaceflight, with lots of budding projects and new organisations joining the effort. This feels like a great time to deepen our connection to this great progress, and we hope ISS Mimic can help us to do that, as well as encourage more students to play in coding, mechatronics, and STEAM.
Be social
You can keep up with Team ISS Mimic on Facebook, Instagram and Twitter.
For more info or to join the team, check out our GitHub page and Discord.
Astro Pi
Did you know that there are Raspberry Pi computers aboard the real ISS that young people can run their own Python programs on? Find out more at astro-pi.org.
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.