The world is full of people who have lost touch with the mechanical roots of technology. They use shiny devices made of glue and glass, with components sealed away and moving parts that are only visible at the microscopic level. They lack heart and soul, and any sense of wonder or joy.
The word ‘algorithm’ may as well be ‘abracadabra’ for most people. Tech is indistinguishable from magic.
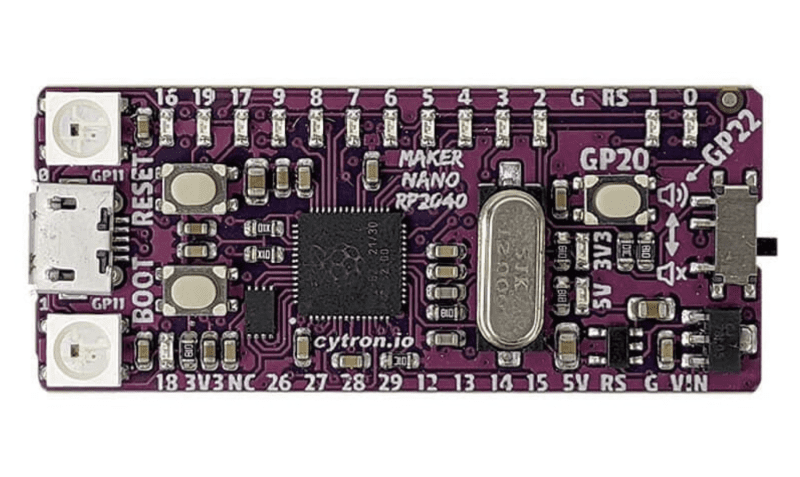
Raspberry Pi Pico has no glass and glue hiding the circuitry. The RP2040 processor is on full display. It’s almost asking you to make something with it.
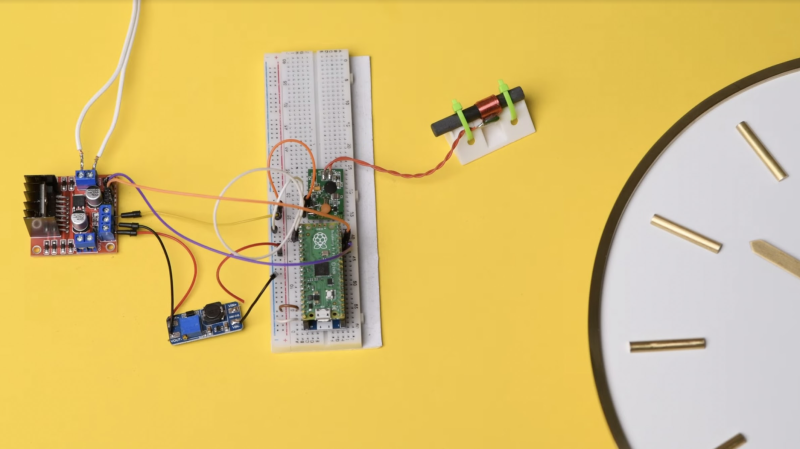
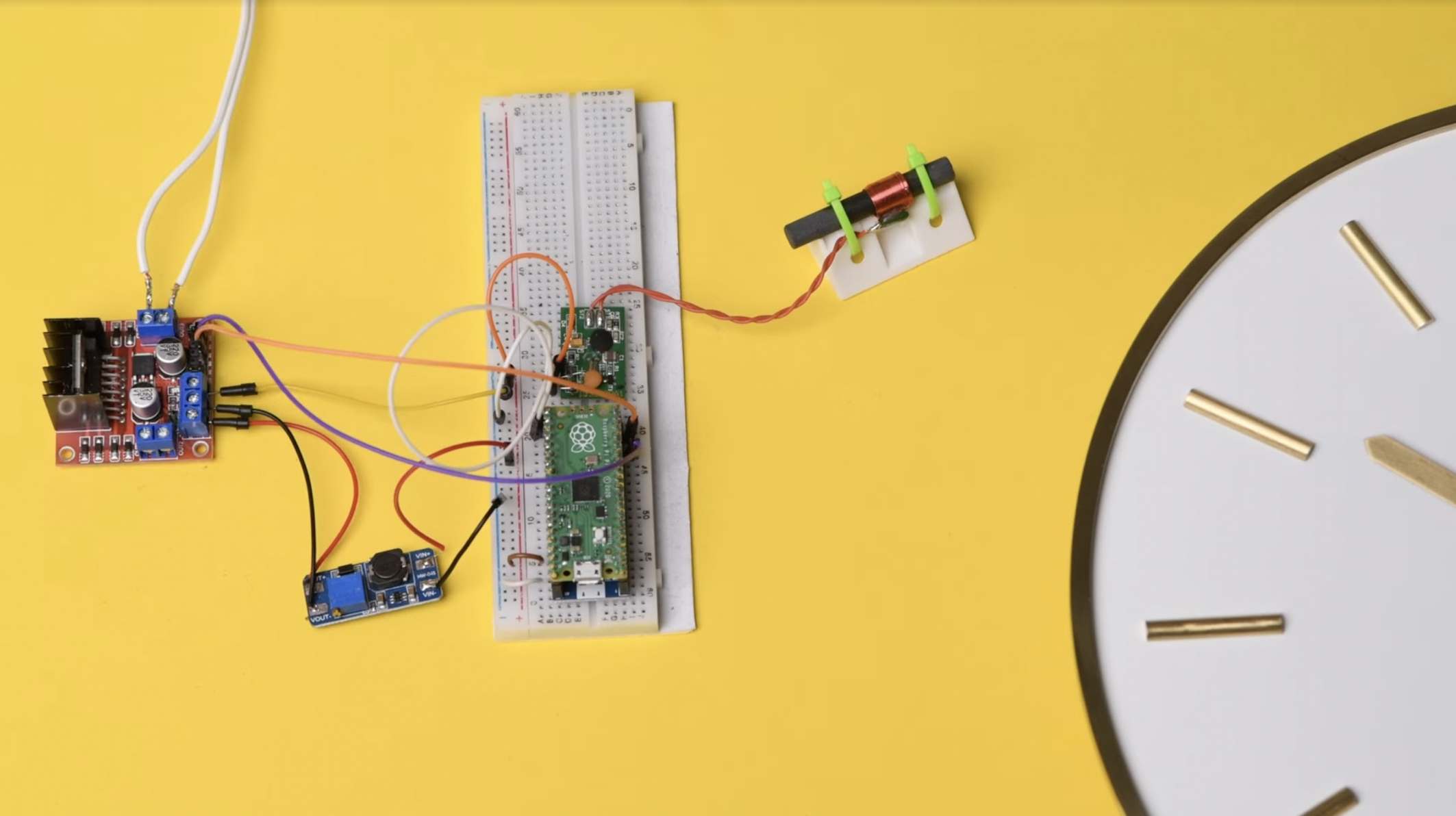
What you make with a new Pico W is, of course, up to you. There’s a world of possibilities, from home automation projects to personal robotics; its ultra‑small footprint and low power consumption make it ideal for wearable projects and embedding on your person or upcycling old equipment with ultra-modern features.
What you are really creating though is a little more personal understanding of the world around you. When delivery robots roll down the street, you’ll see the motors and GPS unit inside; when supermarkets get rid of checkouts, you’ll see the image detection cameras and the micro-location technology. When social media algorithms start to push you towards a more extreme edge of your favourite hobby, you’ll – well, we hope – know enough to step back.
The difference between knowing and not knowing how technology works can be life-changing stuff. The MagPi has been using Raspberry Pi for years to make this difference, in our own small way, to the people who pick up our magazine.
Pico power-up
For the rest of this year we’re going to make the most of Pico W. We’re going to start again, from the ground up.
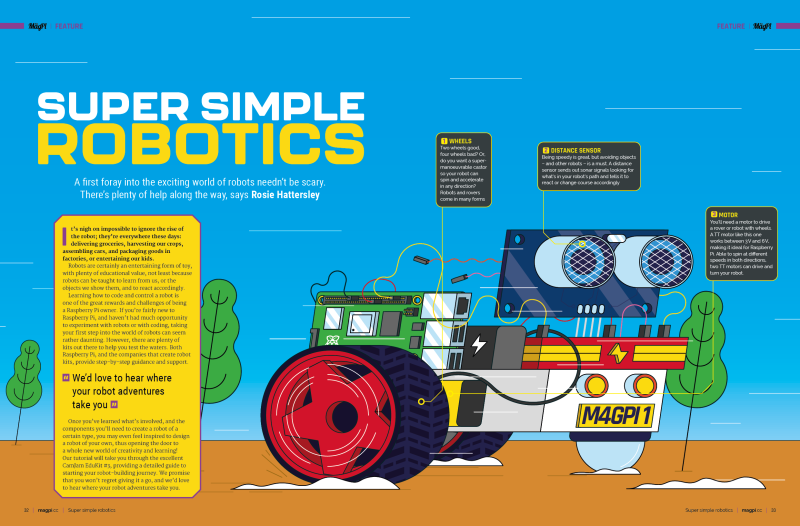
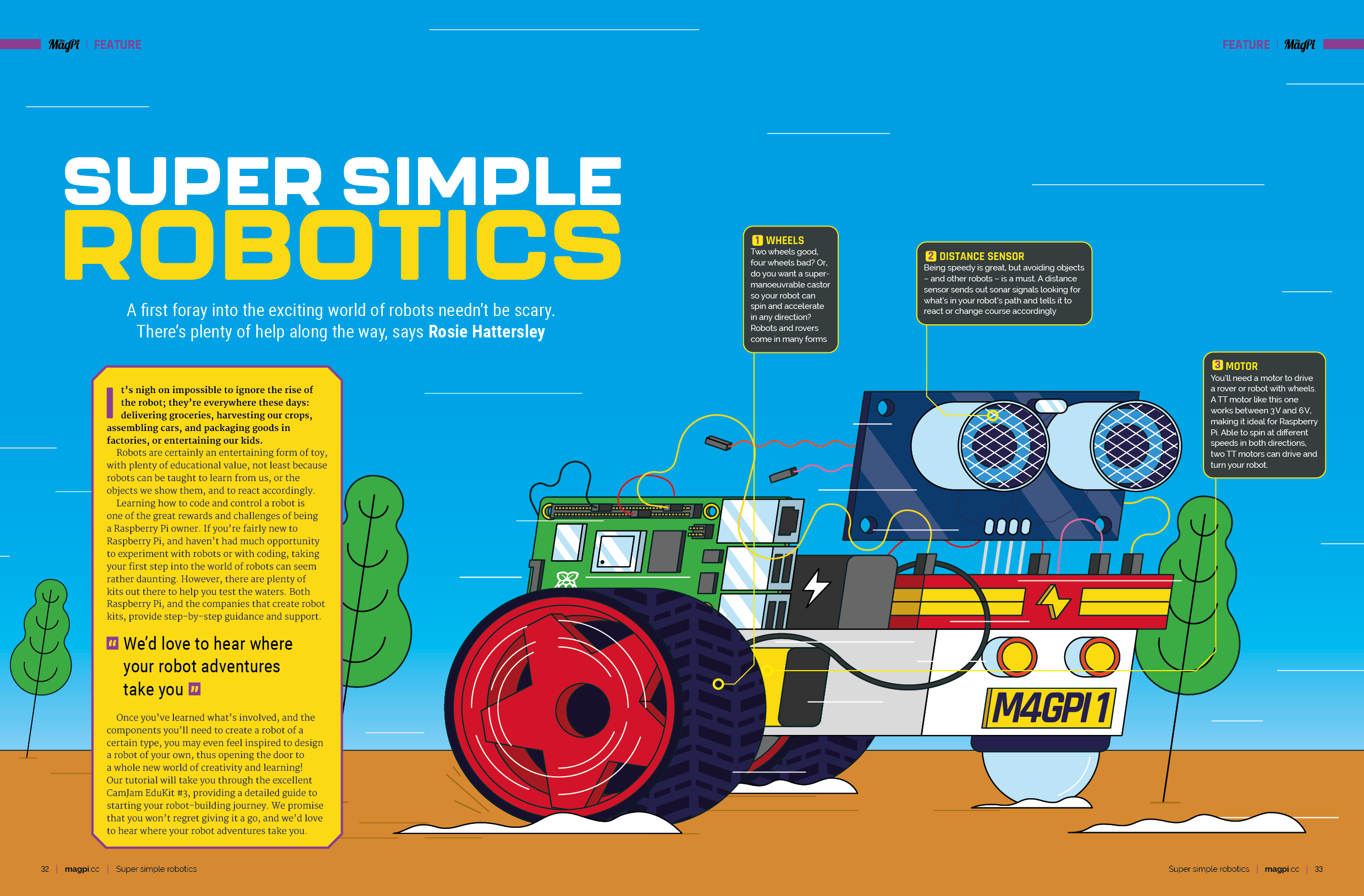
From basic electronics to smart home kits, retro gaming and robotics. We’re going to really go for it all over again. This time with the new Pico W.
Raspberry Pi Pico is a relatively new component in the Raspberry Pi products catalogue. But with Pico W’s addition of wireless LAN networking and in-house silicon, it’s clearly a product having its moment in the spotlight. For various reasons, Pico W remains largely free from the broader supply chain problems. You can get Pico W in plentiful supply and should be able to throughout the rest of the year. So, now is the perfect time to pick up a Pico W and start making with it.
I’ve already got an electronics kit from Pimoroni to play around with, and a smart home automation system. Every one of The MagPi’s editorial team and freelancers have been asked to line up Pico W projects and tutorials. I can’t wait for you to read about what they are working on.
Pico W is, of course, a great thing to happen for Raspberry Pi. But it’s also a great thing for The MagPi. We get to start again with all those projects we love.
It’s also time for us to learn to make a difference all over again. As well as being an incredible engineering tool, Raspberry Pi teaches children – of all ages – how computers work, and how to use computers to make a difference in their lives.