ExoMy 3D Printed Mars Rover
The terrain on Mars is notoriously difficult, so any vehicle intent on exploring the Red
Planet needs to be pretty hardy. Something small and agile, powered by a dependable yet
powerful on-board computer, is likely to fare best against such unforgiving terrain.
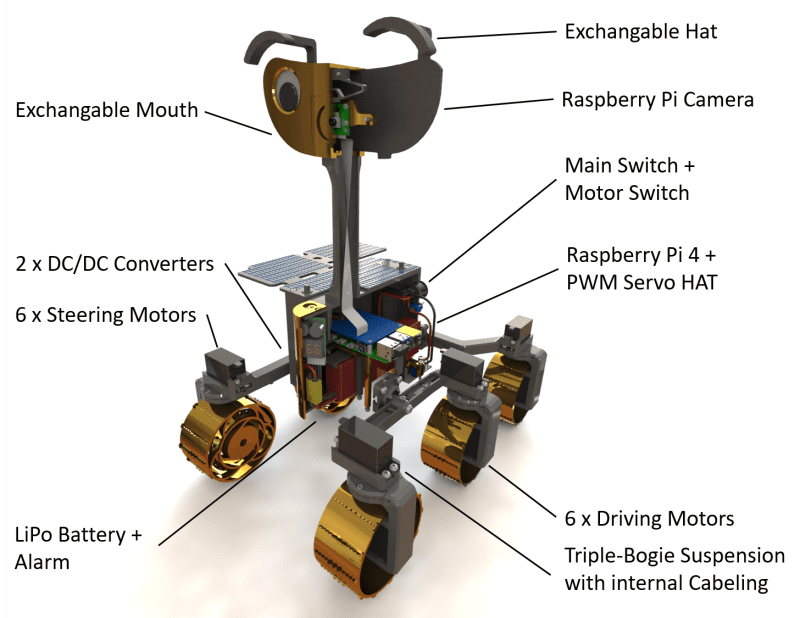
Something, perhaps, like a Raspberry Pi. “The rover is inspired by the ExoMars rover Rosalind Franklin and features its most
characteristic design features (drill, solar panels, wheels),” explain ExoMy’s makers
Maximilian Ehrhardt and Miro Voellmy from the ESA’s Planetary Robotics Laboratory. “Its
triple bogie locomotion suspension and six steerable wheels allow for locomotion in very
rough terrain and [also mean it’s able to traverse] obstacles larger than the size of the
wheel.” Better yet, ExoMy can be controlled using a gamepad or a web interface where the
video stream from its on-board Raspberry Pi camera is also displayed. Raspberry Pi 4 Model B is the ExoMy’s main board computer, receiving driving commands
via the web interface. Raspberry Pi “converts them into motor positions and velocity, which
are sent via I2C to the PWM motor board to make the rover move,” reveals Miro.
Small and perfectly formed

Max and Miro chose Raspberry Pi for ExoMy because it “allows the use of a full-fledged
operating system and provides a wide variety of GPIO pins and a great camera interface.”
They were also attracted by its low cost, worldwide availability – important given their
ambition to make space robotics more accessible – and the large community surrounding
it. “ROS (Robot Operating System) support meant we could use a lot of available open-
source software and ensure that ExoMy stays very modular,” says Miro. Both engineers had used Raspberry Pi in projects before. Miro used Raspberry Pi to
control a spherical robot at the Automation and Robotics Laboratory at ESA that floats on
air and which simulates satellites and spacecraft control algorithms.
Max, meanwhile, worked on a sounding rocket project at university for which he created a
Raspberry Pi telemetry logging HAT.
Building blocks

Although other open-source rovers exist (notably Sawppy and JPL), these had customised
metal housings and are far more expensive than the $250 to $500 required to build your
own ExoMy. A well-received prototype had been produced by trainees in 2018, but it was
rather costly and had reliability issues. At the start of 2020, Miro and Max set out to design
a reliable and reproducible version that was also far more affordable. They designed all
the mechanical parts at the Planetary Robotics Laboratory and 3D-printed them, which
took approximately two weeks. Assembly required another two days. The electronics and
screws all came from commercial suppliers. “The idea was that everyone interested in building ExoMy can easily order, install, and use
it. They can even use the same software tools as in the Planetary Robotics Laboratory,”
says Max. “We try to use as much open-source software as possible,” adds Miro. “ExoMy
is, however, designed in SolidWorks, which is unfortunately not free.”
Details of both the hardware and the freely available software used can be found here.

Max and Miro encourage others to give it a try and advocate using Docker, since it
reduces the need to repeat installations and “allows for a repeatable and reliable software
environment”. Discussing your design challenges with someone, getting a second opinion,
and inviting different views of a problem generally leads to the best solutions, they advise.
You can find out more about ExoMy by joining on Discord.