Designing a two-axis gesture-controlled platform for DSLR cameras
— January 3rd, 2020

Holding your phone up to take an occasional picture is no big deal, but for professional photographers who often need to manipulate heavier gear for hours on end, this can actually be quite tiring. With this in mind, Cornell University students Kunpeng Huang, Xinyi Yang, and Siqi Qian designed a two-axis gesture-controlled camera platform for their ECE 4760 final project.
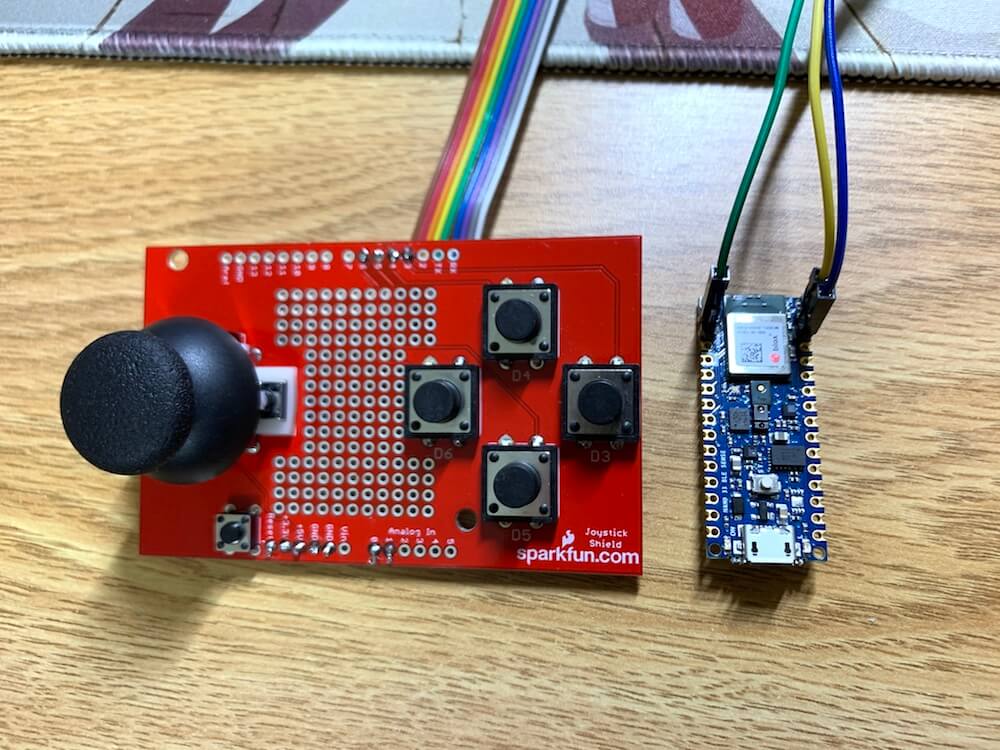
Their device mounts a 3.6kg (~8lb) DSLR camera in an acrylic turret, allowing it to look up and down (pitch) as well as left and right (yaw) under the control of two servo motors. The platform is powered by a PIC32 microcontroller, while human operation is performed via a gamepad-style SparkFun Joystick Shield or through an Arduino Nano 33 BLE Sense.
When in Nano mode, the setup leverages its IMU to move the camera along with the user’s hand gestures, and its built-in light and proximity sensing abilities activate the camera itself.
Our 2-DOF gesture-controlled platform can point the camera in any direction within a hemi-sphere based on spherical coordinates. It is capable of rotating continuously in horizontal direction and traversing close to 180 degrees in vertical direction. It is able to support a relatively large camera system (more than 3kg in total weight and 40cm in length), orient the camera accurately (error less than 3 degree), and respond quickly to user input (transverse 180 degrees in less than 3 seconds). In addition to orienting the camera, the system also has simple control functionality, such as allowing the user to auto-focus and take photos remotely, which is achieved through DSLR’s peripheral connections.
– Werbung –At a high level, our design supports three user input modes — the first one uses a joystick while the other two use an inertial measurement unit (IMU). In the first mode, the x- and y-axis of a joystick is mapped to the velocities in the yaw and pitch directions of the camera. In the second mode, the roll and pitch angles of the user’s hand are mapped to the velocities of the camera in the yaw and pitch directions, while the third mode mapped the angles to the angular position of the camera.
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.