Baby Cheetah is a mini, MIT-inspired quadruped robot
— October 29th, 2019

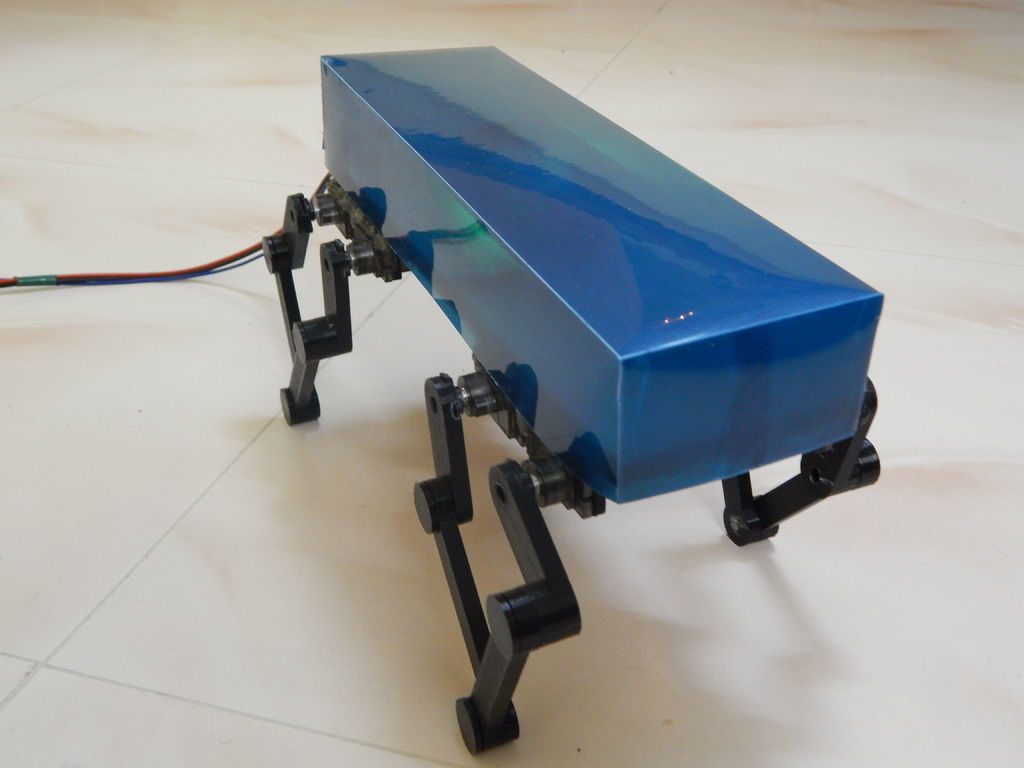
Since we can’t all have the MIT Mini Cheetah at home, Jegatheesan Soundarapandian decided to make his own version — measuring just 23 cm x 9 cm x 9 cm.
As shown in the video below, the aptly named “Baby Cheetah” does an amazing job of getting around on four legs, and is not only able to walk upright, but can even move at a crouch, turn, and tilt forwards or backwards.

The robot is equipped with eight SG90 servos to actuate each 3D-printed leg linage assembly, giving the limbs excellent mobility in a vertical plane. An Arduino Nano is used for control, while an HC-05 Bluetooth module links to a smartphone running a custom app for user interface.
More info and Arduino code is available in Soundarapandian’s project write-up.
[youtube https://www.youtube.com/watch?v=btEk4j-RCMY?feature=oembed&w=500&h=281]
Website: LINK
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.