Walk-Bot helps people with visual impairments navigate safely

It is no secret that visual impairments — even those that don’t result in complete blindness — make it very difficult for people to live their lives. White canes can help people get around, but they require physical contact. Seeing eye dogs provide very valuable assistance, but they’re expensive and need care of their own. That’s why Nilay Roy Choudhury designed the Walk-Bot device to help people with visual impairments navigate safely.
Walk-Bot is a wearable navigation device that uses audible cues and haptic feedback to give visually impaired people a sense of their immediate environment. It has a host of sensors that let it identify nearby obstacles at any height from the floor to the ceiling. Walk-Bot performs onboard trigonometry to determine the distance to any obstacles that might interfere with its user’s ability to walk safely. And it is affordable and easy to build with common components.
Those components include an Arduino Nano board, two HC-SR04 ultrasonic sensors, a GP2Y0A02YK0F infrared sensor, a vibration motor, a buzzer, an MPU-6050 gyroscope, and an HC-05 Bluetooth module. Those all fit inside a 3D-printed wearable enclosure.
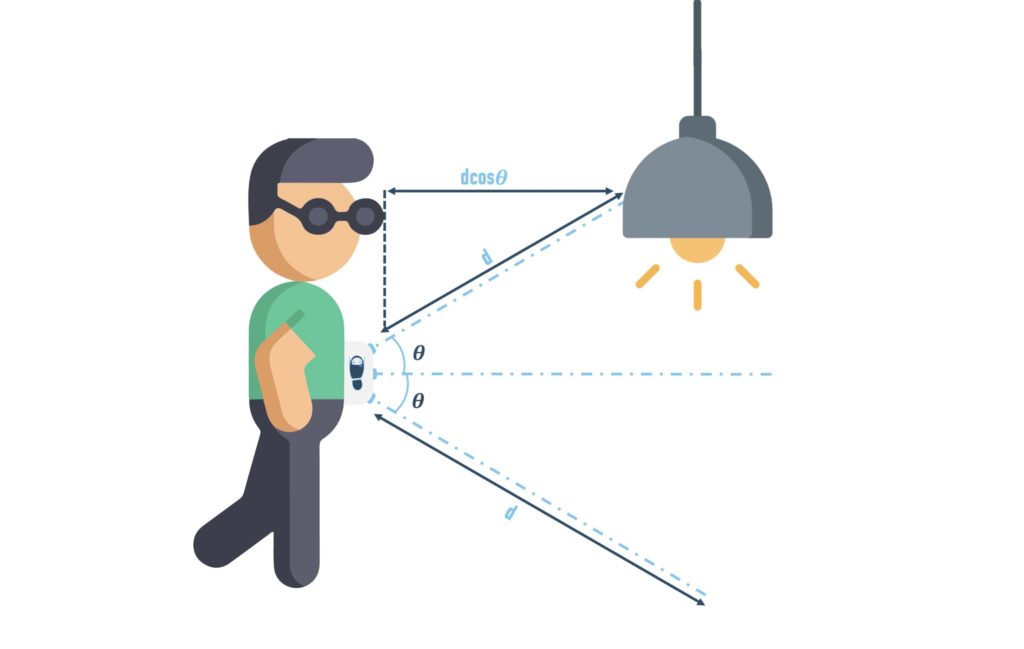
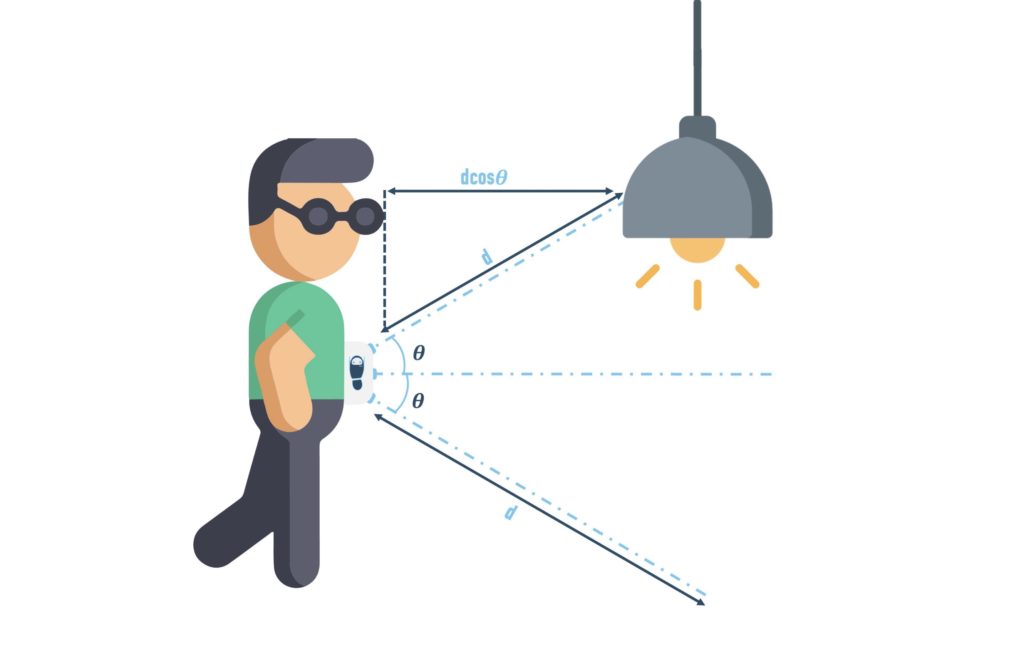
One ultrasonic sensor faces upwards at a 45-degree angle to detect high obstacles. The second ultrasonic sensor faces directly forwards. The infrared sensor points downwards at a 45-degree angle to detect low obstacles and was chosen because ultrasonic sensors struggle with some common floor surfaces. The gyroscope lets Walk-Bot determine its own orientation in space. When it detects an obstacle, Walk-Bot sounds the buzzer and activates the vibration motor. It also includes a panic button that will tell Walk-Bot to connect to the user’s smartphone through the Bluetooth module to message a chosen contact in the event of an emergency.
The post Walk-Bot helps people with visual impairments navigate safely appeared first on Arduino Blog.
Website: LINK