Schlagwort: Soft Robotics
-

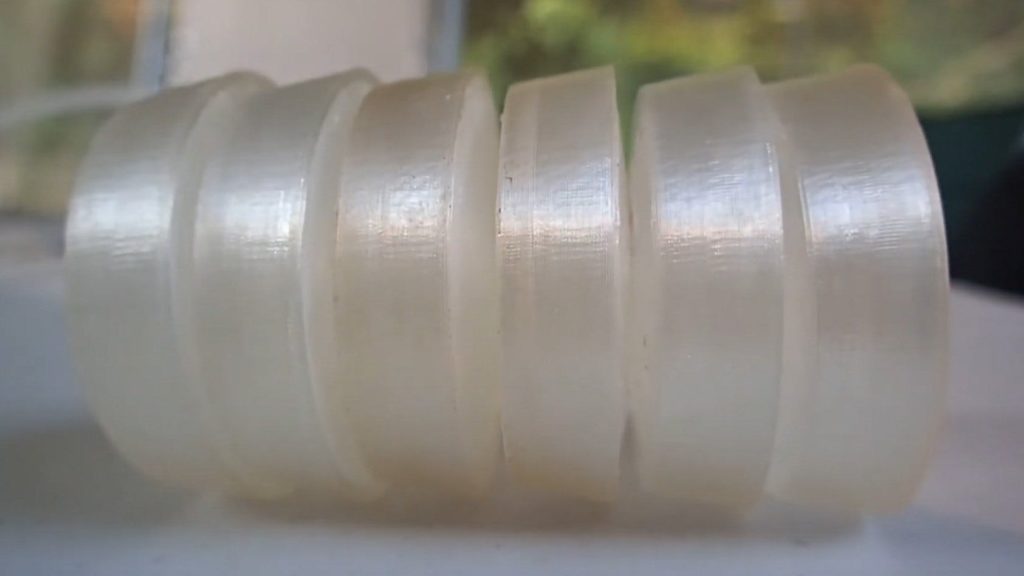
This Arduino-controlled soft robot gets around like an earthworm
Reading Time: < 1 minuteThis Arduino-controlled soft robot gets around like an earthworm Arduino Team — September 28th, 2020 After studying the way a worm wiggles, Nicholas Lauer decided to create his own soft robotic version. What he came up with uses an Arduino Uno for control, inflating six 3D-printed segments sequentially to order to…
-

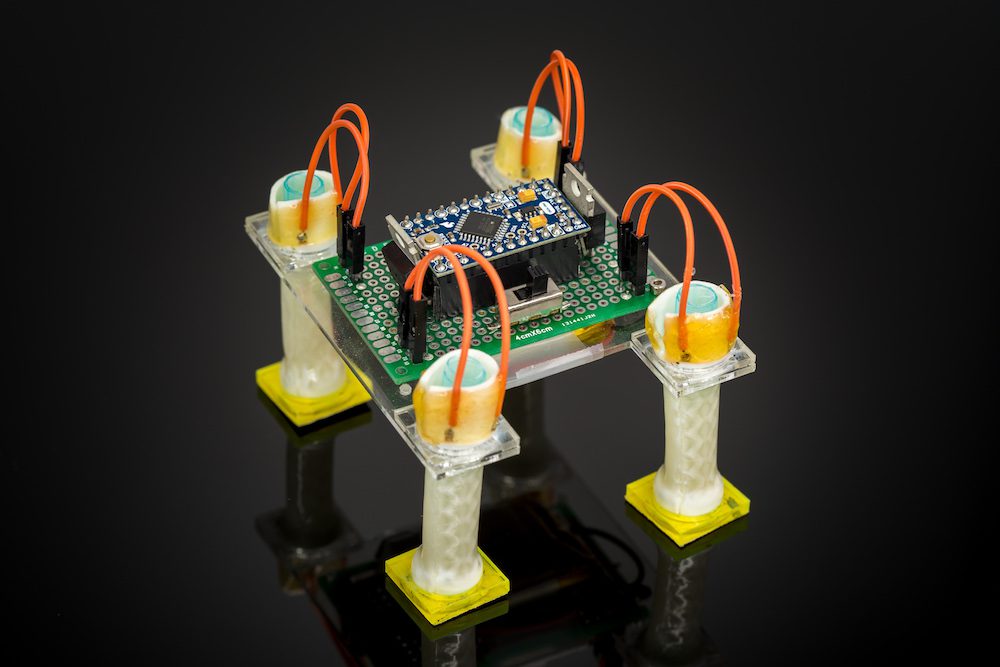
UCSD engineers developed electrically-controlled soft robot actuators
Reading Time: 2 minutesUCSD engineers developed electrically-controlled soft robot actuators Arduino Team — October 12th, 2019 Engineers at the University of California San Diego have come up with a way to build soft robots that are compact, portable and multifunctional without the requirement for compressed air. Instead, they’re using a system of tubular actuators made…