Schlagwort: Self-Balancing Mech
-

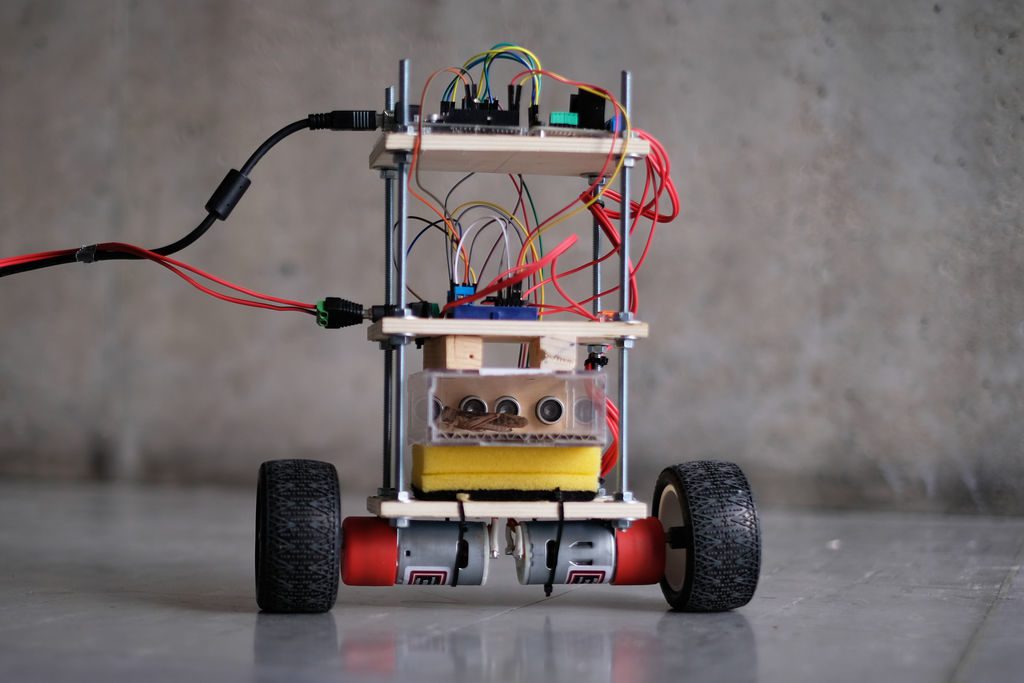
This self-balancing mech is piloted by an insect
Reading Time: < 1 minuteThis self-balancing mech is piloted by an insect Arduino Team — June 14th, 2019 You’ve seen self-balancing robots, where a pair of wheels suspend a mass above them in what’s known as an inverted pendulum configuration. As neat as they are, the “Augmented Arthropod” by Grzegorz Lochnicki and Nicolas Kubail Kalousdian…
-
This self-balancing mech is piloted by an insect
Reading Time: < 1 minuteThis self-balancing mech is piloted by an insect Arduino Team — June 14th, 2019 You’ve seen self-balancing robots, where a pair of wheels suspend a mass above them in what’s known as an inverted pendulum configuration. As neat as they are, the “Augmented Arthropod” by Grzegorz Lochnicki and Nicolas Kubail Kalousdian…
-
This self-balancing mech is piloted by an insect
Reading Time: < 1 minuteThis self-balancing mech is piloted by an insect Arduino Team — June 14th, 2019 You’ve seen self-balancing robots, where a pair of wheels suspend a mass above them in what’s known as an inverted pendulum configuration. As neat as they are, the “Augmented Arthropod” by Grzegorz Lochnicki and Nicolas Kubail Kalousdian…