Schlagwort: Pneumatics
-

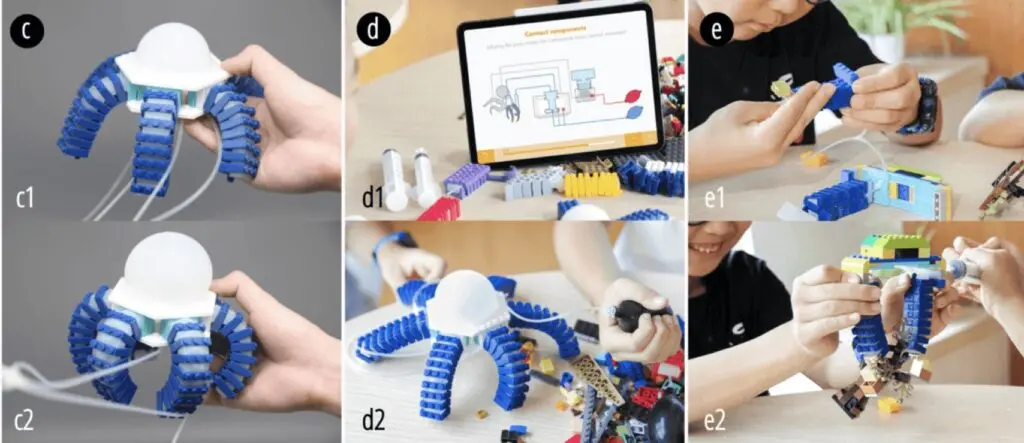
KiPneu makes soft robotic biomimetics accessible to STEAM students
Reading Time: 2 minutesBiomimicry, which is a method for developing new technology inspired by nature, has been one of humanity’s greatest assets. But systems reliant on soft tissue, such as an octopus’s tentacles, have been notoriously difficult to reproduce in the robotics world. To give STEAM students an advantage in the soft robotics arena, a…
-

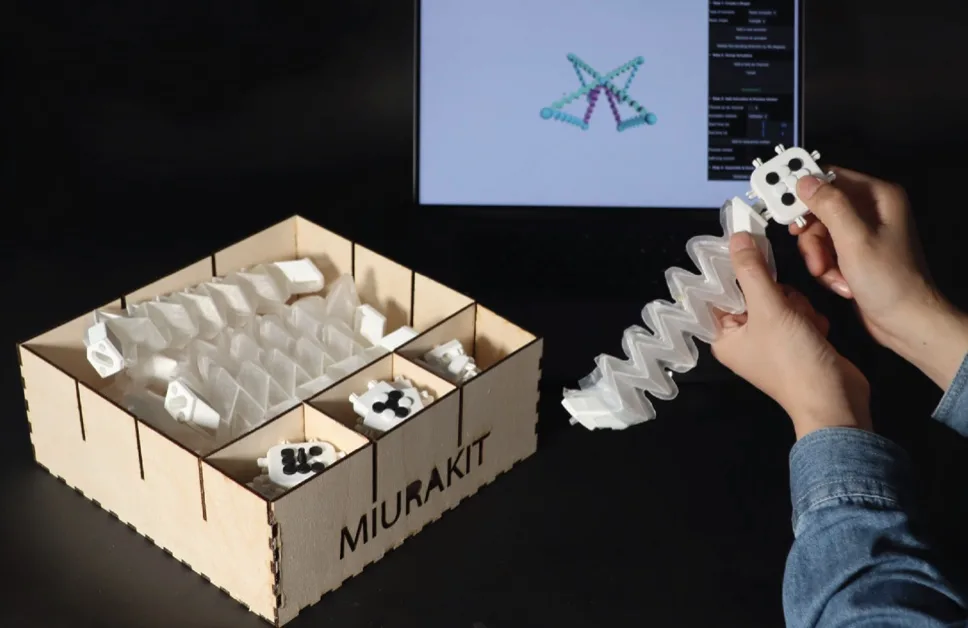
MiuraKit simplifies pneumatic robot design
Reading Time: 2 minutesSoft robotics is a challenging field, because it comes with all of the difficulties associated with conventional robotics and adds in the complexity of designing non-rigid bodies. That isn’t a trivial thing, as most CAD software doesn’t have the ability to simulate the flexibility of the material. You also have to understand how the…
-

Scale up your dragon costume with wings that extend, flap and retract
Reading Time: 2 minutesArduino Team — November 1st, 2021 This year for Halloween, Quint BUILDs wanted to make something special for his daughter’s costume. Quint’s idea was to design and fabricate a pair of mechatronic dragon wings that can mount to a user’s back and move in three different modes by utilizing a set of pneumatic air cylinders. …
-

PneuMat is an interactive shape-changing system to help ensure infants sleep safely
Reading Time: 2 minutesArduino Team — June 3rd, 2021 Every parent knows that babies need to sleep in specific conditions. Sudden Infant Death Syndrome (SIDS) is a very tragic possibility and a number of steps must be taken to prevent it, such as avoiding blankets that can restrict an infant’s breathing. But babies can also…
-

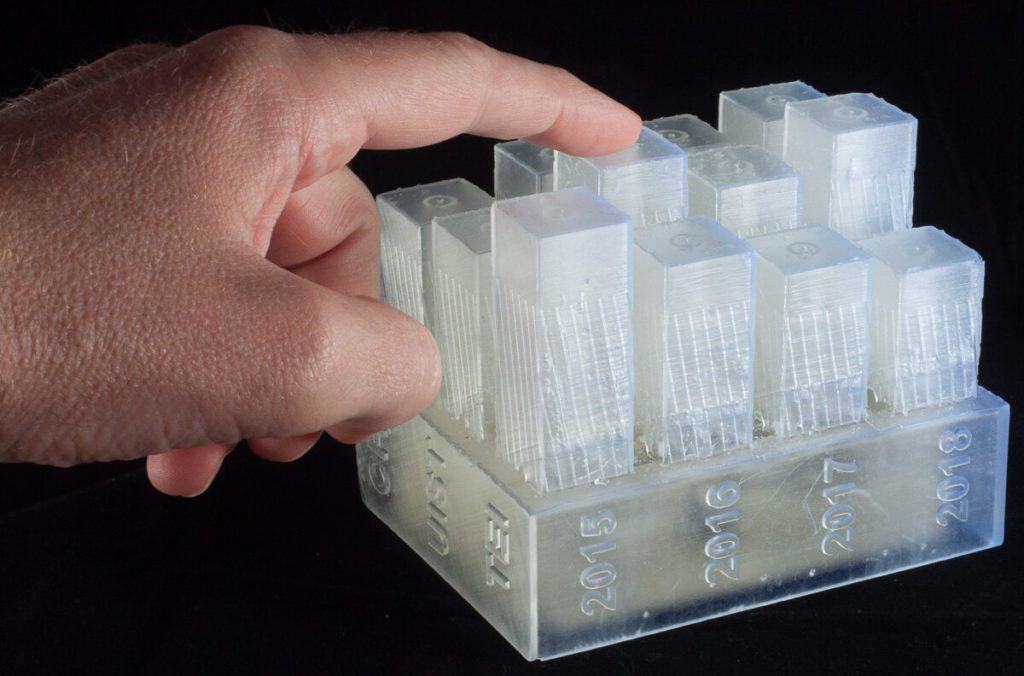
AirTouch: Pneumatic sensing for 3D prints
Reading Time: < 1 minuteAirTouch: Pneumatic sensing for 3D prints Arduino Team — May 22nd, 2020 3D printing allows us to make a wide variety of shapes, but adding interactive features generally means somehow strapping various electronics to them. The AirTouch project, however, presents an alternative option by enabling a fabricated object to sense up to…
-

Programmable-Air is an Arduino Nano-based pneumatics kit
Reading Time: 2 minutesProgrammable-Air is an Arduino Nano-based pneumatics kit Arduino Team — May 1st, 2019 Arduino boards have been employed in all sorts of robotics and IoT applications, although working with air as a power source is less than straightforward. In order to make this experience easier, the Programmable-Air pneumatics kit puts everything you…