Schlagwort: Hexapod
-

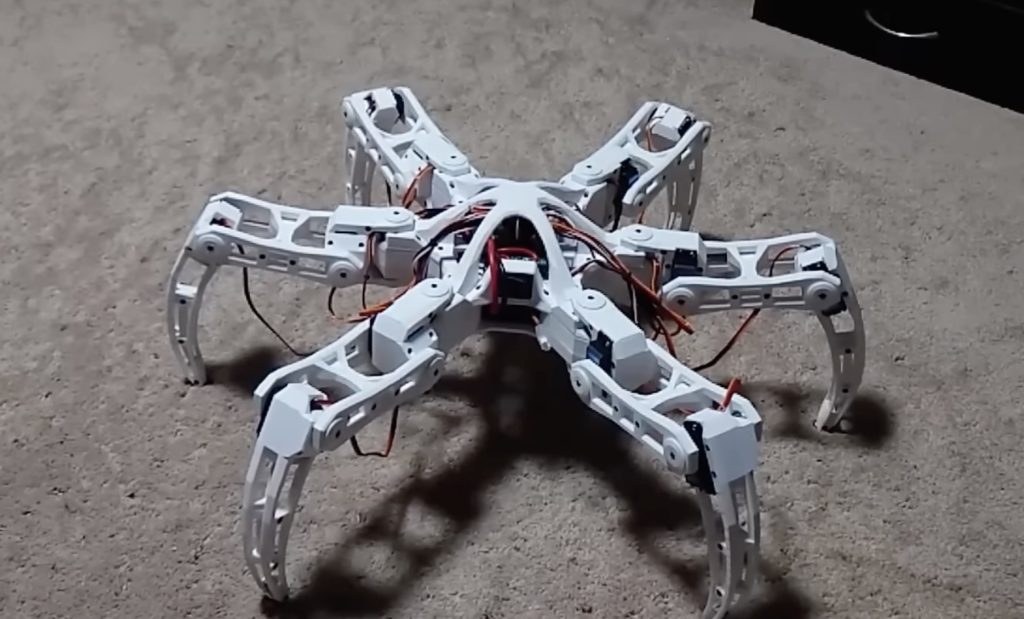
A very nimble DIY hexapod robot
Reading Time: 2 minutesWhile robots can get around on two legs (or even none), it is difficult to get a smooth and efficient gait. Moving up to four legs improves the situation a bit, but each of those legs will still need multiple joints and careful balance for the robot to move in a stable…
-

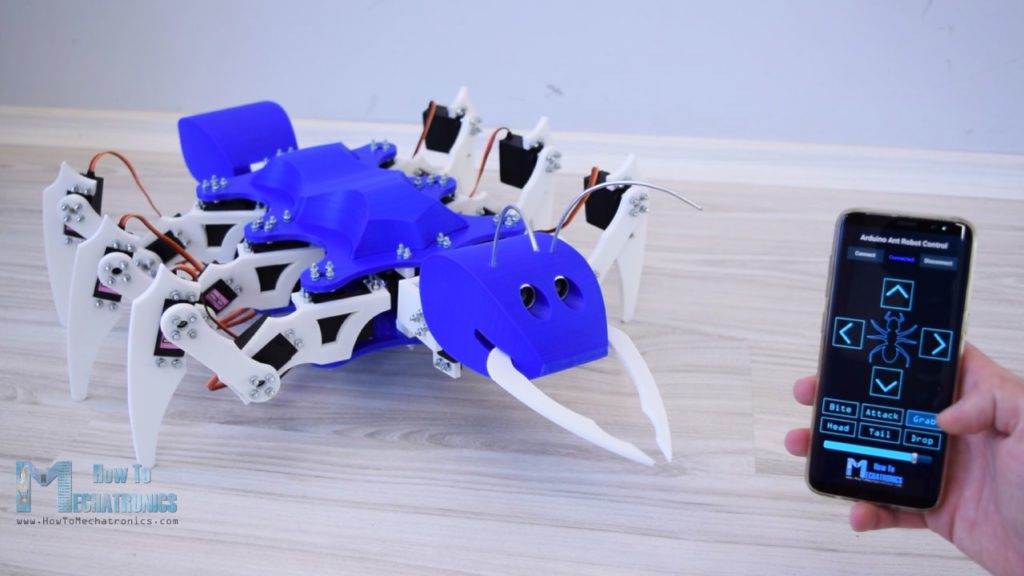
Arduino Mega is the brains of this ant-like hexapod
Reading Time: 2 minutesArduino Mega is the brains of this ant-like hexapod Arduino Team — December 13th, 2018 Six-legged robots are nothing new, but if you’d like inspiration for your own, it would be hard to beat this 22 servo-driven, 3D-printed hexapod from Dejan at How To Mechatronics. The ant-inspired device features three metal geared…