Schlagwort: Flight Controller
-

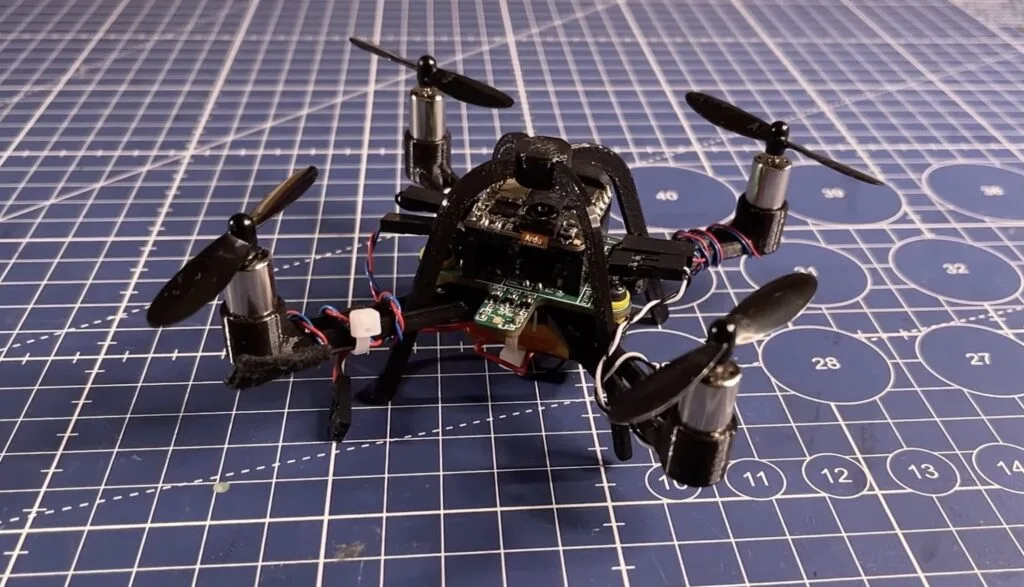
Using an Arduino Nicla Vision as a drone flight controller
Reading Time: 2 minutesDrone flight controllers do so much more than simply receive signals and tell the drone which way to move. They’re responsible for constantly tweaking the motor speeds in order to maintain stable flight, even with shifting winds and other unpredictable factors. For that reason, most flight controllers are purpose-built for the job.…
-

This maker designed a custom flight controller for his supercapacitor-powered drone
Reading Time: 2 minutesBasic drones are very affordable these days—you can literally find some for less than the cost of a fast food drive-thru meal. But that doesn’t mean drones are easy to control. That is actually quite difficult, but manufacturers are able to work off of established reference designs. In a video that perfectly…